If you stay up to date with niche software news, your ears may recently have twitched at the release of a new programming language: V. New hobby-project programming languages are released all the time, you would correctly argue; what makes this one special? The answer is a number of design choices which promote speed and safety: V is tiny and very fast. It’s also in a self-proclaimed alpha state, and though it’s already been used to build some interesting projects, is still at an early stage.
One of the best things about working at the Linux (or similar OS) command line is the use of pipes. In simple terms, a pipe takes the output of one command and sends it to the input of another command. You can do a lot with a pipe, but sometimes it is hard to work out the right order for a set of pipes. A common trick is to attack it incrementally. That is, do one command and get it working with the right options and inputs. Then add another command until that works. Keep adding commands and tweaking until you get the final results.
Pipes can do a lot. They match in with the original Unix philosophy of making each tool do one thing really well. Pipe is really good at allowing Linux commands to talk to each other. If you want to learn all about pipes, have a look at the Linux Info project’s guide. They even talk about why MSDOS pipes were not really pipes at all. (One thing that write up doesn’t touch on is the named pipe. Do a “man fifo” if you want to learn more for now and perhaps that will be the subject of a future Linux Fu.)
This program — called up — continuously runs and reruns your pipeline as you make changes to the pipe. This way, every change you make is instantly reflected in the output. Here’s the video, here’s a quick video which shows off the interactive nature of up.
Installing
The GitHub page assumes you know how to install a go program. I tried doing a build but I didn’t have a few dependencies. Turns out the easy way to do it was to run this line:
go get -u github.com/akavel/up
This put the executable in ~/go/bin — which isn’t on my path. You can, of course, copy or link it to some directory that’s on your path or add that directory to your path. You could also set an alias, for example. Or, like I did in the video, just specify it every time.
Perfect?
This seems like a neat simple tool. What could be better? Well, I was a little sad that you can’t use emacs or vi edit keys on the pipeline, at least not as far as I could tell. This is exactly the kind of thing where you want to back up into the middle and change something. You can use the arrow keys, though, so that’s something. I also wished the scrollable window had a search feature like less.
Otherwise, though, there’s not much to dislike about the little tool. If writing a pipeline is like using a C compiler, up makes it more like writing an interactive Basic program.
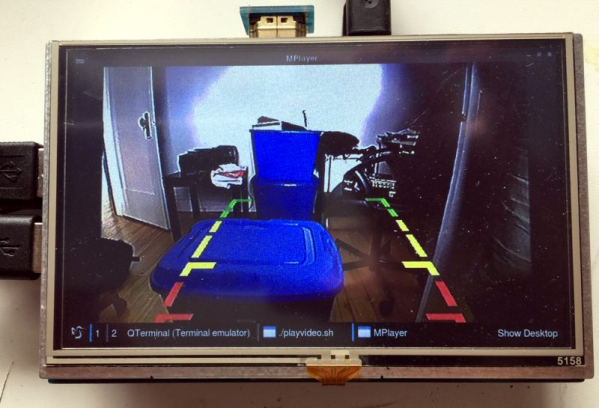
Most new cars have GPS, rear cameras, and all the other wonders an on-board system can bring. But what if you have an old car? [Fabrice Aneche] has a 2011 vehicle, and wanted a rearview camera. He started with a touch screen, a Raspberry Pi 3, and a camera. But you know how these projects take on a life of their own. So far, the project has two entries in his blog.
It wasn’t long before he couldn’t resist the urge to add a GPS. But that’s no fun without maps. Plus you need turn-by-turn directions. [Fabrice] did a lot of the user interface using Qt5 and QML. He started out running it with X11 but that was slow. It turns out though that Qt5 can drive the Pi’s video directly without using X11, so that’s what he wound up doing. The code that isn’t in QML — mainly dealing with the GPS location — is written in Go, while the code for MOCS (My Own Car System) is on GitHub.
The drone is a DJI Tello, which has some impressive hardware like a 14-core Intel processor and excellent video processing abilities. There’s also a vibrant community and a lot of support, making it the ideal platform for a project like this. It communicates to a base station via WiFi, and using some tools like the Wireshark [Rob] was able to decipher a lot of the communications and create a whole new driver for the drone. While the drone can be controlled in the traditional way, users can also write programs to control the drone as well.
The project is both an impressive feat in reverse engineering an inexpensive drone, and a fun example of programming in the Go language. Because of the fun and excitement of drones, they have become a popular platform on which to hack, from increasing their range to becoming a platform for developing AI.
AlphaGo is the deep learning program that can beat humans at the game Go. You can read Google’s highly technical paper on it, but you’ll have to wade through some very academic language. [Aman Agarwal] has done us a favor. He took the original paper and dissected the important parts of in in plain English. If the title doesn’t make sense to you, you need to read more XKCD.
[Aman] says his treatment will be useful for anyone who doesn’t want to become an expert on neural networks but still wants to understand this important breakthrough. He also thinks people who don’t have English as a first language may find his analysis useful. By the way, the actual Go matches where AlphaGo beat [Sedol] were streamed and you can watch all the replays on YouTube (the first match appears below).
For the last few months we’ve been running The Hackaday Prize, a challenge for you to build the best bit of hardware. Right now — I mean right now — you should be finishing up your project, crossing your t’s and dotting your lowercase j’s. The last challenge in the Prize ends tomorrow. After that, we’re going to pick 20 finalists for the Anything Goes challenge, then send the finalists off to our fantastic team of judges. Time to get to work! Make sure your project meets all the requirements!
It’s been a few weeks, so it’s time to start talking about Star Trek. I’m paying ten dollars a month to watch Star Trek: Discovery. I was going to pay that anyway, but I think this might actually be worth it. Highlights include Cardassian voles and Gorn skeletons. Also on the Star Trek front is The Orville, [Seth MacFarlane]’s TNG-inspired show. The Orville has far surpassed my expectations and is more Star Trek than Discovery. Leave your thoughts below.
It’s a new edition of Project Binky! Two blokes are spending years stuffing a 4WD Celica into a Mini. It’s the must-watch YouTube series of the decade.
AstroPrint now has an app. If you’re managing a 3D printer remotely and you’re not using Octoprint, you’re probably using AstroPrint. Now it’s in app format.
Have fifty bucks and want to blow it on something cool? A company is selling used LED display tiles on eBay. You get a case of ten for fifty bucks. Will you be able to drive them? Who knows and who cares? It’s fifty bucks for massive blinkies.
[Peter] is building an ultralight in his basement. For this YouTube update, he’s making the wings.
If you’re messing around with Z-Wave modules and Raspberry Pis, there’s a contest for you. The grand prize is an all-expense paid trip to CES2018 in Las Vegas. Why anyone would be enthusiastic about a trip to CES is beyond me, but the Excalibur arcade has Crazy Taxi, so that’s cool.
Reconfigure.io is accepting beta applications for its environment to configure FPGAs using Go. Yes, Go is a programming language, but the software converts code into FPGA constructs, so you don’t need Verilog or VHDL. Since Go supports concurrent routines and channels for synchronization and communications, the parallel nature of the FPGA should fit well.
According to the project’s website, the tool also allows you to reconfigure the FPGA on the fly using a cloud-based build and deploy system. There isn’t much detail yet, unless you get accepted for the alpha. They claim they’ll give priority to the most interesting use cases, so pitching your blinking LED project probably isn’t going to cut it. There is a bit more detail, however, on their GitHub site.