Despite the fact that it constantly seems like we’re in the midst of a robotics- and artificial intelligence-driven revolution, there are a number of tasks that continue to elude even the best machine learning algorithms and robots. The clothing industry is an excellent example, where the flimsy materials can easily trip up robotic manipulators. But one task like this that seems like it might soon be solve is packing cargo into trucks, as FedEx is trying to do with one of their new robots.
Part of the reason this task is so difficult is that packing problems, similar to “traveling salesman” problems, are surprisingly complex. The packages are not presented to the robot in any particular order, and need to be efficiently placed according to weight and size. This robot, called DexR, uses artificial intelligence paired with an array of sensors to get an idea of each package’s dimensions, which allows it to then plan stacking and ordering configurations and ensure secure fits between all of the other packages. The robot must also be capable of quickly adapting if any packages shift during stacking and re-order or re-stack them.
As robotics platforms and artificial intelligence continue to improve, it’s likely we’ll see a flurry of complex problems like these solved by machine instead of by human. Tackling real-world tasks are often more complex than they seem, as anyone with a printer an a PC LOAD LETTER error can attest to, even handling single sheets of paper can be a difficult task for a robot. Interfacing with these types of robots can be a walk in the park, though, provided you read the documentation first.
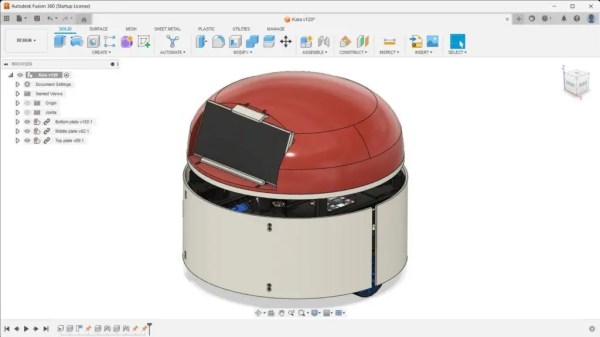


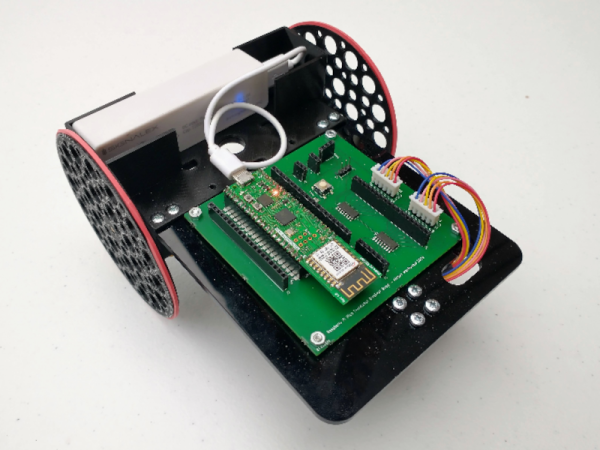
 The robot face is introduced to us with a soundtrack befitting Stranger Things, or maybe Luke Million. The build was inspired by The Doorman, a creepy art piece with animatronic eyes. [Jens’] build started with a 3D model of a 3D mask, with the eyes and mouth modified to have rectangular cutouts for LED displays. The displays are run by a Raspberry Pi Pico, which generates a variety of eye and mouth animations. It uses a camera for face tracking, so the robot’s evil eyes seem to follow the viewer as they move around. In good form, the face has a simple switch—from good to evil, happy to angry. Or, as [Jens] designates the modes: “Fren” and “Not Fren.”
The robot face is introduced to us with a soundtrack befitting Stranger Things, or maybe Luke Million. The build was inspired by The Doorman, a creepy art piece with animatronic eyes. [Jens’] build started with a 3D model of a 3D mask, with the eyes and mouth modified to have rectangular cutouts for LED displays. The displays are run by a Raspberry Pi Pico, which generates a variety of eye and mouth animations. It uses a camera for face tracking, so the robot’s evil eyes seem to follow the viewer as they move around. In good form, the face has a simple switch—from good to evil, happy to angry. Or, as [Jens] designates the modes: “Fren” and “Not Fren.”