
What happens when you put a telepresence robot online for the world to try out for free? Hilarity of course. Double Robotics is a company that builds telepresence robots. The particular robot in question is kind of like a miniature Segway with a tablet computer on top. The idea is you can control it with your own tablet from a remote location. This robot drives around with your face on the screen, allowing you to almost be somewhere when you can’t (or don’t want to) be there in person.
Double Robotics decided to make one of these units accessible to the Internet as a public demonstration. Of course, they couldn’t have one of these things just roaming about their facility unrestrained. They ended up keeping it locked in an office. This gives users the ability to drive it around a little bit and get a feel for the robot. Of course it didn’t take long for users to start to wonder how they could break free from their confinement.
One day, a worker left the office door cracked open ever so slightly. A user noticed this and after enough patience and determination, managed to use the robot to get the door opened. It appears as though the office was closed at the time, so no one was around to witness the event. A joy ride ensued and the robot hid its tracks by locking itself back in the room and docking to the charging station.
While this isn’t a hack in the typical sense, this is a perfect example of the hacker mindset. You are given some new technology and explore it to the extent at which you are supposed too. After that, many people would just toss it aside and not give it a second thought. Those with the hacker mindset are different, though. Our next thought is usually, “What else can I do with it?” This video demonstrates that in a fun and humorous way. Hopefully the company learns its lesson and puts a leash on that thing. Continue reading “Telepresence Robot Demo Unit Breaks Free Of Its Confinement”

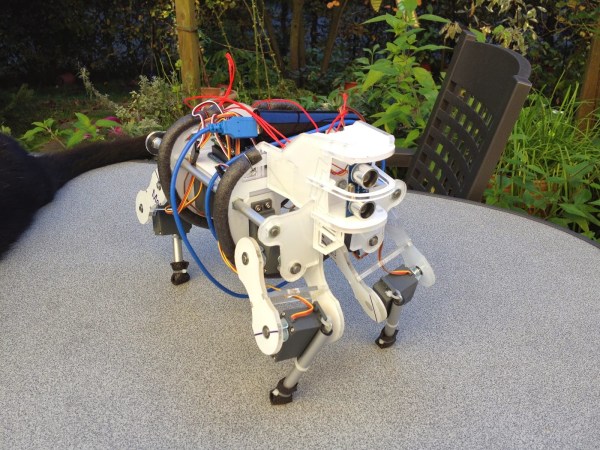
 [Max] designed all of the mechanical parts himself. After weighing the advantages and disadvantages of different materials, he decided that the frame would be made from 5mm acrylic sheet. The main body of the robot has acrylic ribs that are spaced apart by threaded rods. Twelve RC servos make up all of the joints, 3 in each leg. Notice in this photo how there is one servo that immediately rotates another servo. To support the other side of the rotating servo, [Max] epoxied on a T-nut, stuck in a short length of threaded rod which is then supported in the frame by a ball bearing. Simple and effective! The upper portions of the legs are also made from acrylic sheet and the lower legs are from a cheap camera tripod. Rubber feet ensure a slip resistant stance.
[Max] designed all of the mechanical parts himself. After weighing the advantages and disadvantages of different materials, he decided that the frame would be made from 5mm acrylic sheet. The main body of the robot has acrylic ribs that are spaced apart by threaded rods. Twelve RC servos make up all of the joints, 3 in each leg. Notice in this photo how there is one servo that immediately rotates another servo. To support the other side of the rotating servo, [Max] epoxied on a T-nut, stuck in a short length of threaded rod which is then supported in the frame by a ball bearing. Simple and effective! The upper portions of the legs are also made from acrylic sheet and the lower legs are from a cheap camera tripod. Rubber feet ensure a slip resistant stance.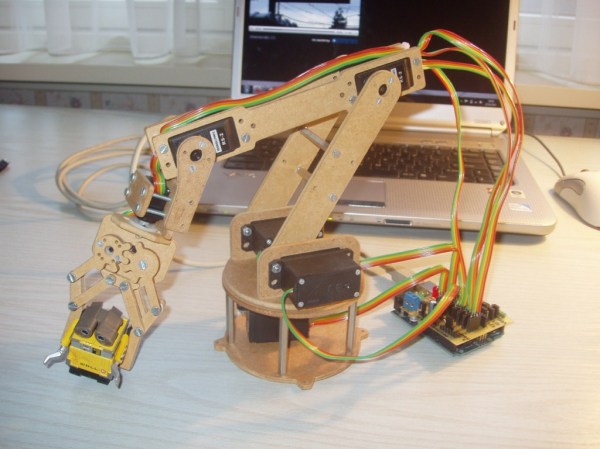
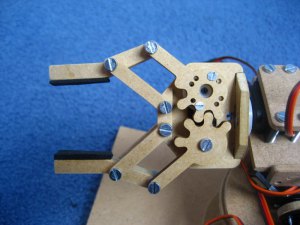 Like any project, there were some hiccups along the way. First, several revisions of the gripper were necessary to get the correct tooth profile that resulted in smooth and tight movement. Also, while making the shield the spacing between banks of headers came out one header too close! On this first board [jjshortcut] just bent the pins so they would fit into the Arduino. You can’t let some minor snafu prevent forward momentum of a project!
Like any project, there were some hiccups along the way. First, several revisions of the gripper were necessary to get the correct tooth profile that resulted in smooth and tight movement. Also, while making the shield the spacing between banks of headers came out one header too close! On this first board [jjshortcut] just bent the pins so they would fit into the Arduino. You can’t let some minor snafu prevent forward momentum of a project!

 By now you’d think we’ve seen just about every means of robotic actuator possible. We have Cartesian bots, Stewart platforms, SCARA bots, Delta bots, and even
By now you’d think we’ve seen just about every means of robotic actuator possible. We have Cartesian bots, Stewart platforms, SCARA bots, Delta bots, and even 








