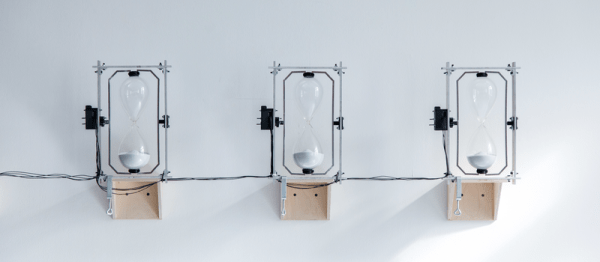
French robot-artist [Lyes Hammadouche] tipped us off to one of his latest works: a collaboration with [Ianis Lallemand] called Texel. A “texel” is apparently a time-pixel, and the piece consists of eight servo-controlled hourglasses that can tip themselves over in response to viewers walking in front of them. Besides making graceful wavelike patterns when people walk by, they also roughly record the amount of time that people have spent looking at the piece — the hourglasses sit straight up when nobody’s around, resulting in a discrete spatial representation of people’s attentions to the piece: texels.
We get jealous when we see artists playing around with toys like these. Texel uses LIDAR scanners, Kalman-filtered naturally, to track the viewers. openFrameworks, OpenCV, and ROS. In short, everything you’d need to build a complex, human-interactive piece like this using completely open-source tools from beginning to end. Respect!















