As easy as it is to make a late 1980s-style game console using a modern microcontroller, there’s arguably more fun in doing things the traditional way. This is the challenge that [Throaty Mumbo] took upon himself when he embarked on his retro game console project, called simply the Game Console V2.

In the accompanying video the development process and other details are covered and demonstrated. Most notable perhaps are the proper cartridges with ROMs on a parallel bus rather than something like SD cards, and the absence of any modern ports including even VGA. This means only composite AV output like in the good old days of RF splitters and other assorted fun.
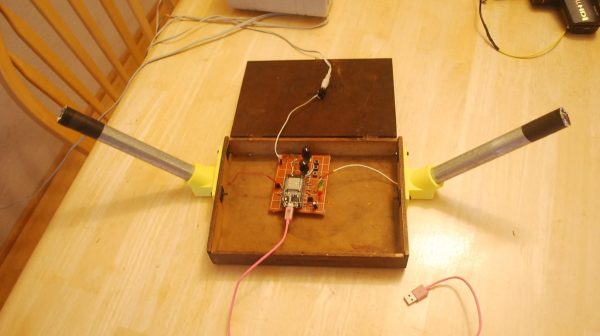
The NTSC output signal is generated by an RP2350 MCU in the form of the PGA-shaped PGA2350 breakout board that’s wired into a 6-bit R-2R network for RGB332 output via the RCA jack, while audio is fed into a PCM5102A I2S DAC. For controllers you get 4-pin Bulgin SA2367 connectors and an N64-compatible protocol.
It’s noted that the use of an RP2350B MCU is temporary, as the goal with the V3 version of the project is to take it into a proper 8- or 16-bit CPU direction. We’re certainly looking forward to seeing this next revision of what looks to be a pretty interesting game console.
Continue reading “Making A Retro(ish) Game Console From Scratch”