Often we bring you projects at the end of their trajectory so that you can marvel at a job well done, but sometimes we point you instead to the start of the story. Such is the case with [Brett Smith]’s investigation of discarded fish aggregation buoys, referred to as FADs. These 700-plus dollar devices are deployed in the ocean in the thousands by commercial fishing fleets, and most are not recovered. He’s looking at them from the point of view of re-using their technology in the marine conservation business.
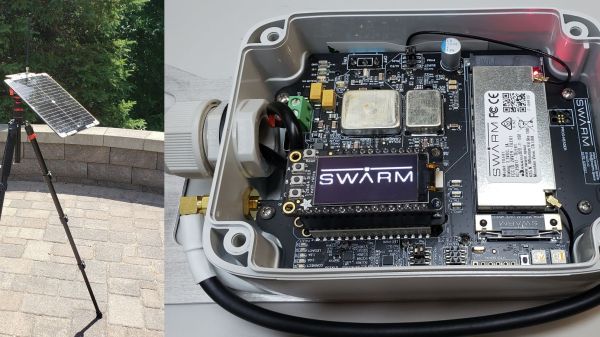
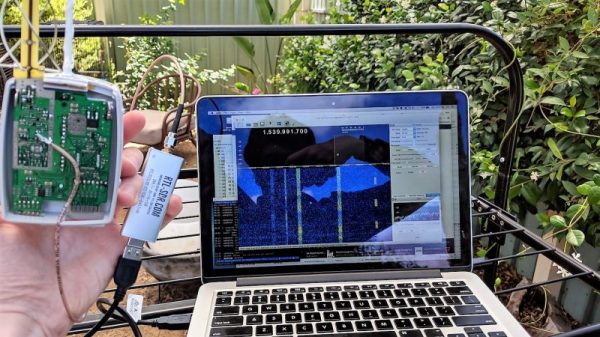
His progress has been documented in a series of short YouTube videos, starting with an introduction that we’ve placed below the break. So far he’s gone on to a complete teardown, and then a detailed look at the PCB. Inside they have a solar charger for a bank of NiCd cells, an echo sounder, a GPS receiver, and an Iridium satellite modem allowing the device to phone home. There’s certainly plenty in there to experiment with, including a few slightly exotic parts, so keep an eye on his channel as we’re sure to see more.
These devices have never made it to Hackaday before, but we have seen an echo sounder on a surfboard.
Continue reading “What Can You Do With Discarded Fish Aggregation Devices”