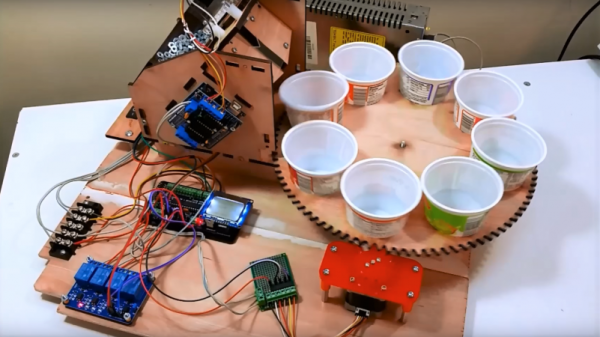
We all have that one drawer or box full of random hardware. You don’t want to get rid of anything because as soon as you do, that’s the one thing you’ll need. But, honestly, you’ll be lucky to find what you need in there, anyway. Enter [Mr. Innovative’s] nut sorting machine. As you can see in the video below, it will make order out of the chaos, at least for nuts.
You might think the device would need optical recognition software or some other high-tech mechanism. But, in fact, it is nothing more than a motor with a speed controller. The sorting is done by a plastic piece built like stairs. When a nut is too tall to fit under the next step, it slides out into the output hopper. You could probably turn the whole thing with a crank and no electricity at all if you wanted to.
Drilling out the shaft required a bit of machine tool usage, so this might not be a great weekend project without a lathe. Like many of the commenters on the video mentioned, we probably wouldn’t have used a rod holder as a rotating bearing, either, but for as little as something like this would probably operate, it is likely to last a fair amount of time. It would be easy to replace it or even affix a shaft to the motor with a coupler, sidestepping several issues.
Apparently, the device isn’t perfect. You do get some missorts. We imagine that’s from a larger nut pushing a smaller nut on the way to the hopper. The Thingiverse files seem to be missing, but this is something you’d probably adapt to your own design, anyway.
It isn’t as automated, but we’ve seen a gadget that can help sort drill bits, too. Sometimes you want to sort little parts by color, too.
Continue reading “Automatic Nut Sorter For A Tidy Workspace”