Sand has been used to keep track of the passage of time since antiquity. But using sand to make a persistence of vision digital clock (English translation) is something altogether new. And it’s pretty cool, too.
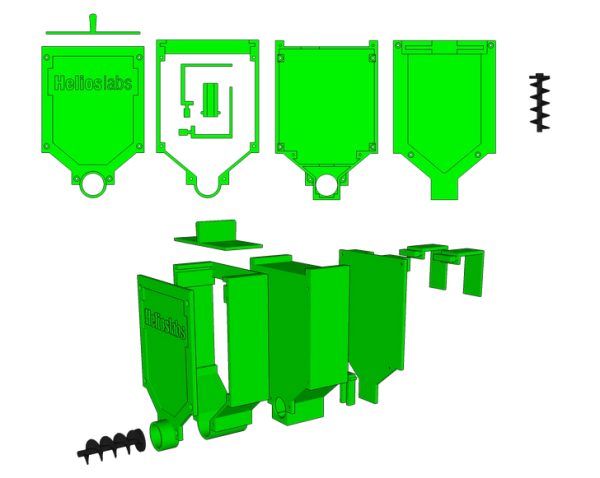
The idea behind the timepiece that [Álvaro Gómez Giménez] built is pretty simple drop a tiny slug of fine sand from a hopper and light it up at just the right point in its fall. Do that rapidly enough and you can build up an image of the digits you want to display. Simple in concept, but the devil is in the details. Sand isn’t the easiest material to control, so most of the work went into designing hoppers with solenoid-controlled gates to dispense well-formed slugs of sand at just the right moment. Each digit of the clock has four of these gates in parallel, and controlling when the 16 gates open and close and when the LEDs are turned on is the work of a PIC18F4550 microcontroller.
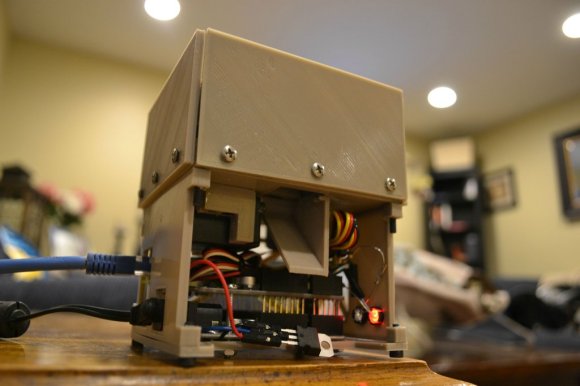
The build has a lot of intricate parts, some 3D printed and some machined, but all very carefully crafted. We particularly like the big block of clear plastic that was milled into a mount for the main PCB; the translucent finish on the milled surfaces makes a fantastic diffuser for the 96 white LEDs. The clock actually works a lot better than we expected, with the digits easy to make out against a dark background. Check it out in the video below.
Between the noise of 16 solenoids and the sand getting everywhere, we’d imagine it wouldn’t be a lot of fun to have on a desk or nightstand, but the execution is top-notch, and an interesting and unusual concept we haven’t seen before. Sure, we’ve seen sandwriting, but that’s totally different. Continue reading “POV Digital Clock Is The Literal Sands Of Time”