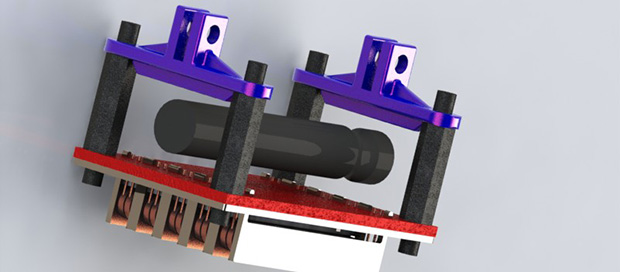
Imagine a quadcopter hovering above a payload – a can of beans, perhaps. The ‘copter descends onto the payload, activates an electromagnet, and flies away with a hobo’s dinner. Right now, this is a bit of an impossibility. A normal electromagnet that powerful would consume an amazing amount of power, something quads don’t usually have in abundance. With the OpenGrab project, the dream of a remote-controlled skycrane is within reach, thanks to some very clever applications of magnetics.
The tech behind the OpenGrab is an electro-permanent magnet, basically an electromagnet you can turn on and off, but doesn’t require any power to stay on. OpenGrab was heavily influenced by a PhD thesis aimed at using these devices for self-assembling buildings.
This project had a very successful Kickstarter campaign and has seen some great progress in the project. While beer doesn’t come in steel cans anymore, we can imagine a whole lot of really cool applications for this tech from infuriating electronic puzzles to some very cool remote sensing applications.