 Hosting a New Year’s Eve party, but don’t want to be stuck behind the bar all night? You could set out a bowl or two of
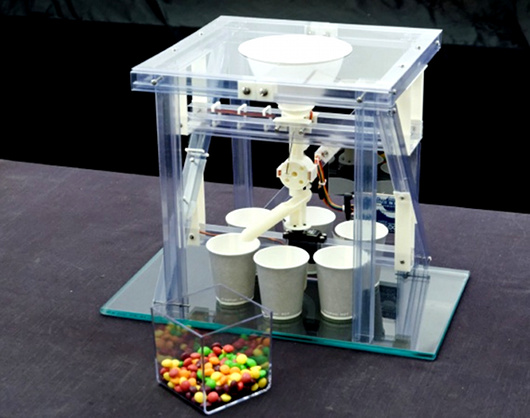
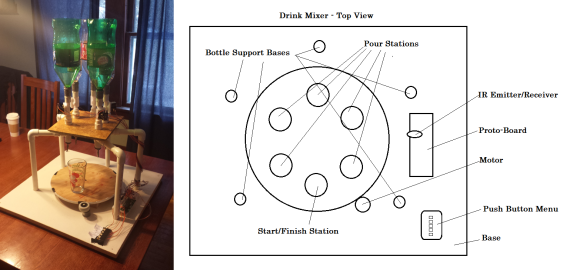
Hosting a New Year’s Eve party, but don’t want to be stuck behind the bar all night? You could set out a bowl or two of spiked punch, but where’s the hack? Free yourself from drink slinging duties with the Automated Drink Mixer created by Cornell University students [Justin] and [Austin]. Their design uses a 14″ diameter lazy Susan powered by a 12V bi-directional motor attached to a 2″ rubber wheel. The motor is capable of 70RPM, so the glass ultimately rides around at 10RPM. Orders are entered on a push-button menu. As this is a school project that should adhere to IEEE standards, all libations are non-alcoholic.
The software uses an overarching state machine, so the system polls for input from the menu at idle. When it receives an order, the lazy Susan rotates the glass to the right spout or series of spouts and then returns it to the starting point. [Justin] and [Austin] controlled the position of the glass with an IR emitter and phototransistor. This pair detects the black strips of tape around the edge which are spaced 60° apart. A comparator digitizes the signal and triggers an interrupt in the software, which counts the number of 60° slices. A full demonstration is waiting for you after the jump. Before you jump: drink responsibly, kids. If you aren’t up to that particular challenge, make yourself an alcohol-aware LED ice cube. If you need more LEDs in your life, whip up the Inebriator.
Continue reading “Automated Drink Mixer Is The Life Of The Party”