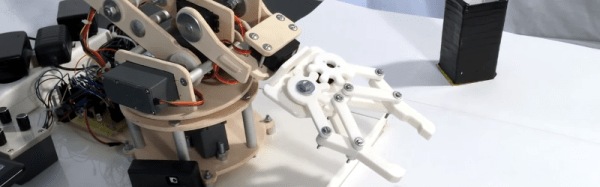
Robotic hacker [Andrea Trufini] apparently likes choices. Not only does his robotic arm have six degrees of freedom, but it has a variety of ways he can control it. The arm’s software can accept commands through a programming language, via potentiometers, an infrared remote, or–the really interesting part–through spoken commands.
The videos don’t show too much of the build detail, but the arm is mainly constructed of laser cut plywood and uses an Arduino. Hopefully, we’ll see more particulars about the build soon but for now have a look at a similar project.
The software (myrobotlab) is on github and looks very impressive. The Java-based framework has a service-oriented architecture, with modules that support common processors (like the Arduino, Raspberry Pi, and Beagle Board) along with I/O devices (like motors, sound devices, and that Leap Motion controller you just had to buy). As you might expect from the demonstration found below, there are speech to text and text to speech services, too. Like a lot of open source projects, some of these services are more ready for prime time than others but that just means you can contribute your hacks back to the project.

 The enclosure for this project was initially printed in PLA, the parts glued together and finally filled for a nice, smooth finish. [Chris] says PLA was a bad choice – the low melting point means the heat from milling the face plate gums up the piece. In the future, he’ll still be using printed parts for enclosures, but for precision work he’ll move over to milling polystyrene sheets.
The enclosure for this project was initially printed in PLA, the parts glued together and finally filled for a nice, smooth finish. [Chris] says PLA was a bad choice – the low melting point means the heat from milling the face plate gums up the piece. In the future, he’ll still be using printed parts for enclosures, but for precision work he’ll move over to milling polystyrene sheets.

 The data pushes out to the Thingspeak server which handles pushing data out to the bigger network, and data representation (like the cool Google gauge in the picture). The best part: [Vegard] gets a phone notification when he accidentally leaves his soldering iron on. How perfect is that?
The data pushes out to the Thingspeak server which handles pushing data out to the bigger network, and data representation (like the cool Google gauge in the picture). The best part: [Vegard] gets a phone notification when he accidentally leaves his soldering iron on. How perfect is that?