
If you are a lover of motorcycling, you’ll probably fit into one or other of the distinct groups of riders. Maybe you’re a sportsbike lover always trying to get your knee down, a supermotard who gets their knee down without trying, a trailie rider for whom tarmac is an annoyance between real rides, or a classic bike enthusiast who spends more time in the workshop than riding.
[Xavier Morales] is none of these, for he cruises the roads of his native Catalonia on a Harley-Davidson Sportster. If you’re familiar with Harleys only from popular culture, or you’re a sportsbike rider who derides them for anachronistic handling and brakes, it’s worth taking a look at a modern Harley from a technical standpoint. Despite styling and brand ethos that evokes another era with the trademark large V-twin engine that looks to the untrained eye the same as it did decades ago, today’s Harley is a very modern machine, and much more capable than the sneering sportsbiker would give it credit for.
There is one area though in which [Xavier]’s Harley was sorely lacking. Its single instrument was a speedometer, it had no rev counter. You might think this would be less of an issue with the lower-revving Harley engine than it would be with a Japanese sportsbike that exists in a hail of revs, but it was annoying enough to him that he built his own tachometer. His write-up of the project is both lengthy and fascinating, and well worth a read.
The Sportster’s data bus follows an established but obsolete standard, SAE J1850 VPW. Since driver chips for this bus are out of production, he had to create his own using a transistor and a couple of resistors. Once he has the data he feeds it to a PIC 18F2553 which in turn runs a display driver chip controlling a brace of 7-segment LEDs. There are also a set of LEDs to indicate gear changes. The whole is installed in a 3D-printed housing alongside the original speedometer, behind the glass from another dial. As a result it looks as though the bike was always meant to be a two-clock design, with a professional appearance.
If you’d like to see it in action, he’s posted a few videos, and we’ve put one below the break. The beautiful Catalan scenery and the mountain twisties look very inviting.
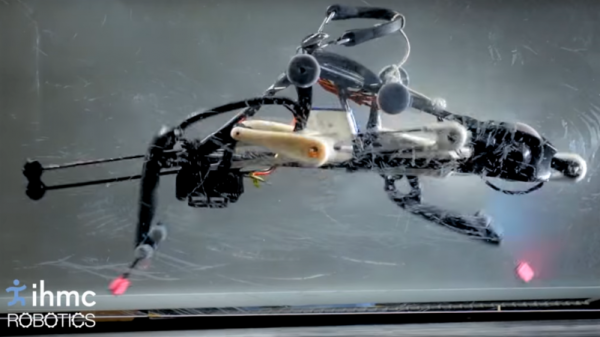
 A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.
A single motor runs the entire drive chain using linkages that will look familiar to anyone who has taken an elliptical trainer apart, and there’s not a computer or sensor on board. The PER keeps its balance by what the team calls “reactive resilience”: torsion springs between the drive sprocket and cranks automatically modulate the power to both the landing leg and the swing leg to confer stability during a run. The video below shows this well if you single-frame it starting at 2:03; note the variable angles of the crank arms as the robot works through its stride.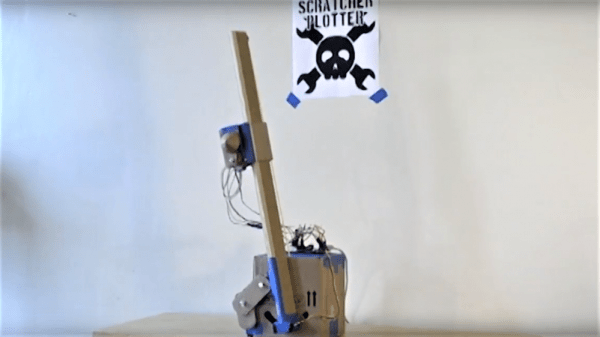
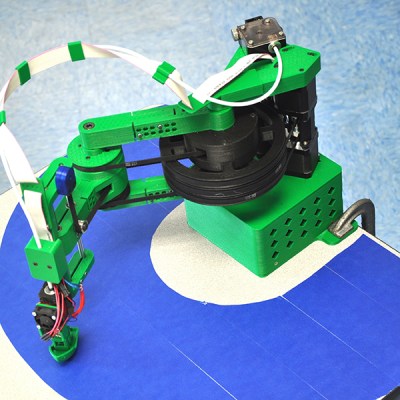
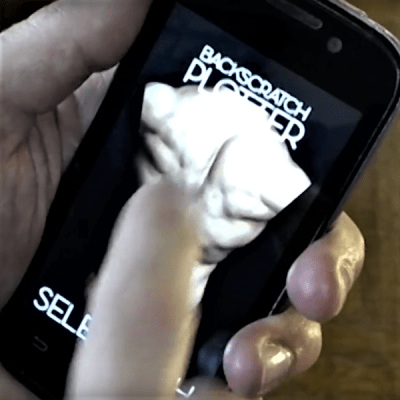 [VijeMiller] has aluminum extrusion tastes on a cardboard budget, but don’t let that put you off this clever build. The idea is pretty simple: a two-axis plotter that moves a rotary-action business end to any point within a V-shaped work envelope. The Arduino in the base talks to a smartphone app that lets you point to exactly the spot in need of attention on what for most of us would be an incredibly optimistic photorealistic map of the dorsal aspect of the body (mildly NSFW photo in the link above dips below the posterior border). Point, click, sweet relief.
[VijeMiller] has aluminum extrusion tastes on a cardboard budget, but don’t let that put you off this clever build. The idea is pretty simple: a two-axis plotter that moves a rotary-action business end to any point within a V-shaped work envelope. The Arduino in the base talks to a smartphone app that lets you point to exactly the spot in need of attention on what for most of us would be an incredibly optimistic photorealistic map of the dorsal aspect of the body (mildly NSFW photo in the link above dips below the posterior border). Point, click, sweet relief.

 [Nick] is designing a new kind of RepRap,
[Nick] is designing a new kind of RepRap, 










