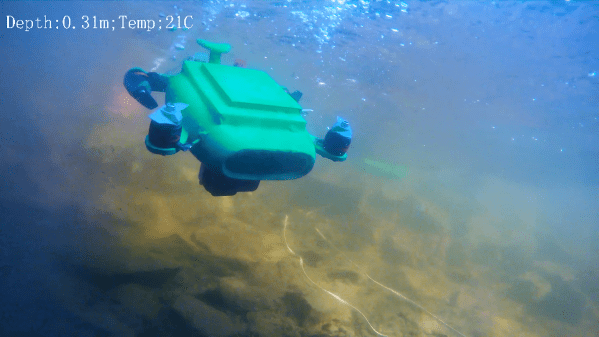
The differences between a drone and an underwater remote-operated vehicle (ROV) aren’t actually that large. Both have powerful motors that move large volumes of fluid (yes, air is a fluid), a camera, a remote, and an onboard battery. So when [RCLifeOn] got his hands on a cheap used drone, he reckoned that it could fly underwater just as well as it did in the air.
To his credit, the principle was sound, and the initial tests looked promising. However, we will spoil the ending and tell you it doesn’t work out as well as he hoped due to water leakage. He printed a case with a large panel for accessing electronics inside and an acrylic window for the camera. The panel pressed up against a gasket via the few dozen metric screws along the perimeter. Despite the design being quite whimsical, he quickly regrets the screws as getting inside is tiring on the wrists. He epoxies the hatch to the hull and drills holes to charge the battery to stop the seemingly never-ending water leaks. After its maiden journey, water got inside and fried some of the motor controllers. So for the second test run, he used what limited capabilities it had left.
Despite the project not working out how he expected, it’s a great example of how some reused parts and some 3d printing can make something entirely different. So perhaps next time, instead of throwing that broken drone away, see if it could be given just a bit of love. Possibly the propellers can be combined or make do with only three motors. Or just go the [RCLifeOn] route and make it into something new entirely.
Continue reading “It Turns Out You Can’t Just Fly A Drone Under Water”