If you’re reading a thermocouple with one of those fancy schmancy SPI thermocouple amplifiers, this one isn’t for you. If, however, you’re still going through those old-school analog thermocouple amplifiers like the AD595, [miceuz] has just the thing for you. He’s come up with a library for embedded devices that reads the temperature of a k-type thermocouple with +- 0.03°C of accuracy.
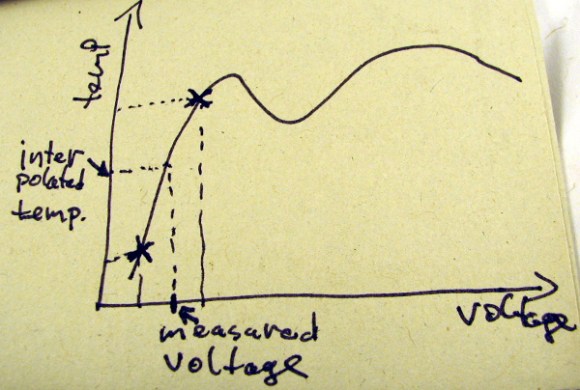
As with anything dealing with natural phenomena, the voltage generate by the bimetallic junction of a thermocouple probe is decidedly non-linear. This is a problem when dealing with embedded devices, as that would mean using floating point arithmetic, greatly increasing the amount of code. [micuez] found the NIST tables for a K-type thermocouple and interpolates the actual temperature of the thermocouple probe from the NIST data. The usual way of measuring thermocouples – a polynomial unction of some sort – has an error of about 0.06°C. [miceuz]’s library has an error of less than half that, all while using less code.
The library doesn’t support temperatures below zero, but this is still a work in progress. Still, if you’re looking for a very accurate library for a forge, crock pot sous vide build, or a toaster oven reflow controller, you can’t do better than [miceuz]’s work.