Few things build excitement like going to space. It captures the imagination of young and old alike. Teachers love to leverage the latest space news to raise interest in their students, and space agencies are happy to provide resources to help. The latest in a long line of educator resources released by NASA is an Open Source Rover designed at Jet Propulsion Laboratory.
JPL is the birthplace of Mars rovers Sojourner, Spirit, Opportunity, and Curiosity. They’ve been researching robotic explorers for decades, so it’s no surprise they have many rovers running around. The open source rover’s direct predecessor is ROV-E, whose construction process closely followed procedures for engineering space flight hardware. This gave a team of early career engineers experience in the process before they built equipment destined for space. In addition to learning various roles within a team, they also learned to work with JPL resources like submitting orders to the machine shop to make ROV-E parts.


Once completed, ROV-E became a fixture at JPL public events and occasionally visits nearby schools as part of educational outreach programs. And inevitably a teacher at the school would ask “The kids love ROV-E! Can we make our own rover?” Since most schools don’t have 5-axis CNC machines or autoclaves to cure carbon fiber composites, the answer used to be “No.”
Until now.
Continue reading “Six Wheels (En)rolling: Mars Rovers Going To School”

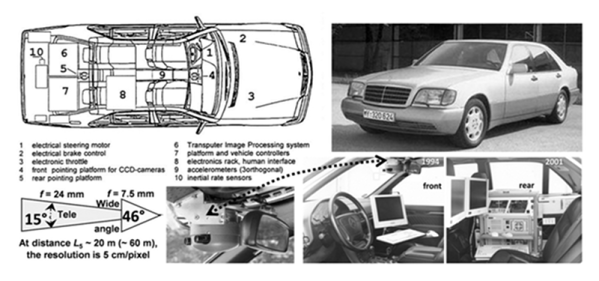
 The aim of the project was to demonstrate the feasibility of a rover exploring a planetary surface, picking up, and examining rocks. Lest you imagine a billion dollar budget for gleaming rover prototypes, it’s fair to say that this was to be achieved with considerably more modest means. The rover was a repurposed unit that had previously been used for remote handling of hazardous chemicals, and the project’s computer was an extremely obsolete DEC PDP-1.
The aim of the project was to demonstrate the feasibility of a rover exploring a planetary surface, picking up, and examining rocks. Lest you imagine a billion dollar budget for gleaming rover prototypes, it’s fair to say that this was to be achieved with considerably more modest means. The rover was a repurposed unit that had previously been used for remote handling of hazardous chemicals, and the project’s computer was an extremely obsolete DEC PDP-1.