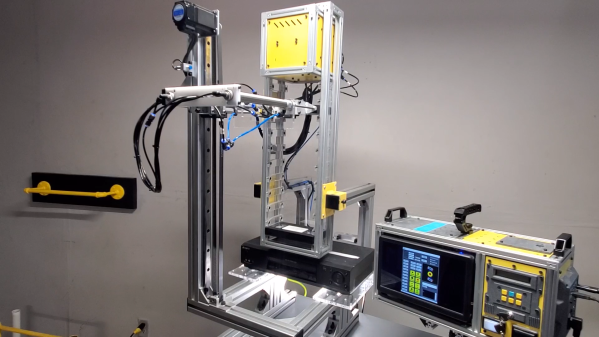
Industrial robots are shockingly expensive when new, typically only affordable for those running factories of some sort. Once they’ve gone through their life cycle building widgets, they can be purchased for little more than scrap value, which is essentially free compared to their original sticker price. [Excessive Overkill] explains all of this in a video where he purchased one at this stage to try to revive, but it also shows us how to get some more life out of these robots if you can spend some time hunting for spare parts, installing open-source firmware, and also have the space for a robot that weighs well over a thousand kilograms.
This specific robot is a Fanuc R2000ia with six degrees of freedom and a reach of over two meters. Originally the plan was to patch together a system that could send modern gcode to the Fanuc controller, but this was eventually scrapped when [Excessive Overkill] realized the controller that shipped with this robot was for an entirely different machine and would never work. Attempts to find upgraded firmware were frustrated, and after a few other false starts a solution was found to get the robot working again using LinuxCNC and Mesa FPGA cards, which have built-in support for Fanuc devices like this.
More after the break…
Continue reading “Industrial Robot Gets Open-Source Upgrade”

 nRF24L01 boards and build yourself a copy of the remote control [saul] handily provides in
nRF24L01 boards and build yourself a copy of the remote control [saul] handily provides in