While air hockey is a fine amusement, it isn’t much fun if you can’t find someone to play against. Unless that is, you build a mini table with a robotic defender. [Vaib], [Nathan], and [Navish] can show you how. There is a video you can see below that shows two players using the table without the robot.
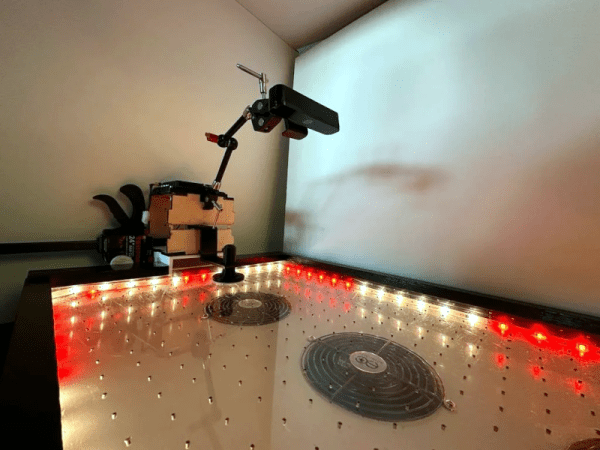
The project takes a bit of woodworking, as you might expect. You also have to drill 576 holes for the air to lift the puck. Some of the components are 3D printed in PETG, too. The automated defense uses a camera and relies on the fact that the puck is the only red thing on the table. A servo moves to intercept the incoming puck and return the shot. We were disappointed the video didn’t show the automated play.
We wondered if they had considered making a pair of the detachable robots and letting them play with each other. If you prefer football, the robot could probably adapt. We’ve seen other robot air hockey contenders, so maybe a better idea would be to build different robots and let them compete for a gold medal.