It makes sense to use drones to patrol borders or perimeters. But there’s a problem. Drones have to carry batteries or fuel and mostly have a short operating time. A new paper from the University of Houston proposes a solution by recharging drones in flight using a novel wireless charging mechanism. What’s the cost? Another paper explores the economics of the approach.
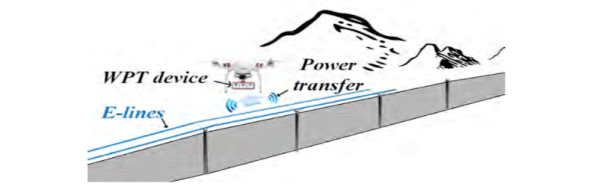
The system relies on electric lines running along a border wall feeding wireless power transfer devices that allow the drone to recharge in flight. This is akin, we think, to an electric train that takes power from the third rail except, in this case, the power rail is wireless. Also, the drone would still have batteries to enable it to go off the rail as needed.
The paper mentions that the source power could be from wind or solar, but that’s not necessarily important and it also requires a storage battery in the system that you could omit if using conventional power. In addition, you’d think batteries and solar panels might be targets for theft in remote areas.
The paper mentions that another alternative is to simply have charging towers along the wall where drones land to recharge. This is easier, we think, but it does put the drone out of full operation status while charging. On the other hand, cheap drones could work in shifts to cover an area, so it seems like that might be a better solution than charging while flying.
What do you think? How would you make a long-duration drone? Fuel cells? In-flight battery swapping from a refueling drone? Laser power? Maybe a magnetic battery swap system where the drone swoops over a charger to drop off and pick up a fresh battery? Let us know what you would try or — even better — what you have done.
We’ve seen a drone pit stop robot already. Refueling drones have been done, too. But it does seem like something better is possible.



 But here’s a drone story from this rainswept isle sure to put a smile on the face of multirotor enthusiasts worldwide, as Denmead Drone Search And Rescue, an organisation who locate missing pets using drones, enticed lost dog Millie from a soon-to-be-engulfed tidal mudflat by the simple expedient of
But here’s a drone story from this rainswept isle sure to put a smile on the face of multirotor enthusiasts worldwide, as Denmead Drone Search And Rescue, an organisation who locate missing pets using drones, enticed lost dog Millie from a soon-to-be-engulfed tidal mudflat by the simple expedient of 











