Sometimes the most mundane products have surprisingly sophisticated internals. What’s in a game controller? If it is a Wii remote, you’ll find a lot inside–an IR sensor, Bluetooth, an accelerometer, and EEPROM. It also has a six pin expansion port that allows I2C peripherals connect to the controller.
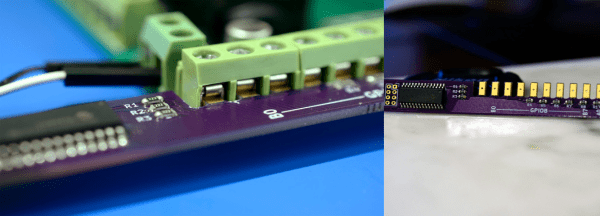
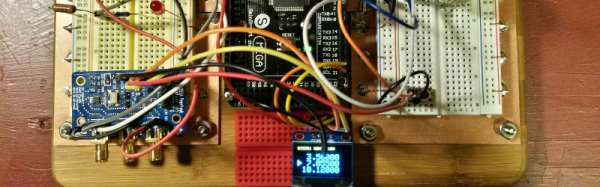
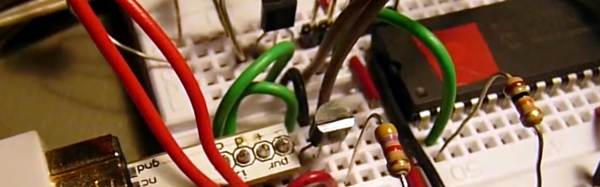
[DotMusclera] wanted to experiment with a gyroscope and decided to hook up to the Wii MotionPlus to a Microchip PIC. Using information from the WiiBrew wiki, [DotMusclera] connected a PIC18F4550, an LCD, and a handful of components (mostly to do 3.3V level conversion), he set up the hardware on a breadboard. The only odd part you might have to work around is a Wii breakout board that converts from the breadboard to the Wii interface.
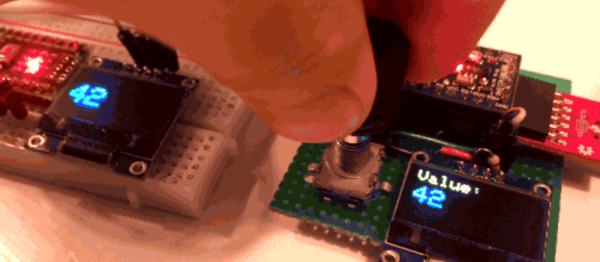
The software is easy to follow since it is written in Hi-TECH C and well-commented. The hardware lacks a schematic, but from the parts list and the video, you can probably figure it out. The setup works well and shows roll, pitch, and yaw on the LCD screen.
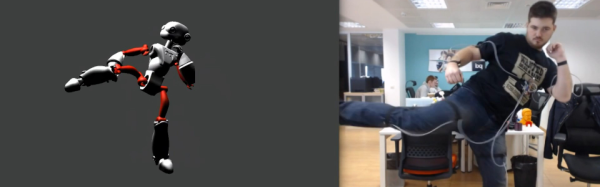
The project log is very detailed, with a lot of information about gyroscopes and the communication format the gyro uses. The video demo is worth watching as well.
Continue reading “Wii MotionPlus Gyro To Microchip PIC” →