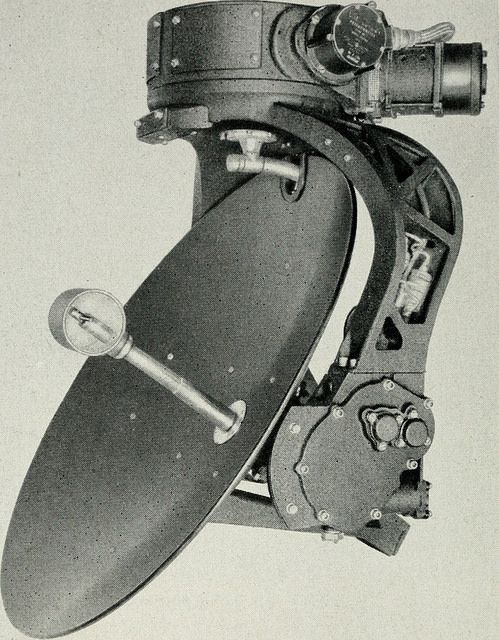
Before the digital age, when transistors were expensive, unreliable, and/or nonexistent, engineers had to use other tricks to do things that we take for granted nowadays. Motor positioning, for example, wasn’t as straightforward as using a rotary encoder and a microcontroller. There are a few other ways of doing this, though, and [Void Electronics] walks us through an older piece of technology called a synchro (or selsyn) which uses a motor with a special set of windings to keep track of its position and even output that position on a second motor without any digital processing or microcontrollers.
Synchros are electromagnetic devices similar to transformers, where a set of windings induces a voltage on another set, but they also have a movable rotor like an electric motor. When the rotor is energized, the output windings generate voltages corresponding to the rotor’s angle, which are then transmitted to another synchro. This second device, if mechanically free to move, will align its rotor to match the first. Both devices must be powered by the same AC source to maintain phase alignment, ensuring their magnetic fields remain synchronized and their rotors stay in step.
While largely obsolete now, there are a few places where these machines are still in use. One is in places where high reliability or ruggedness is needed, such as instrumentation for airplanes or control systems or for the electric grid and its associated control infrastructure. For more information on how they work, [Al Williams] wrote a detailed article about them a few years ago.
Continue reading “Investigating Electromagnetic Magic In Obsolete Machines”