Have you ever been walking around the house, desperate to know the ambient temperature, humidity, and barometric pressure? Have you ever wanted to capture that data with a small remote-controlled platform? If so, this project from [TUENHIDIY] will be exactly what you’ve been looking for.
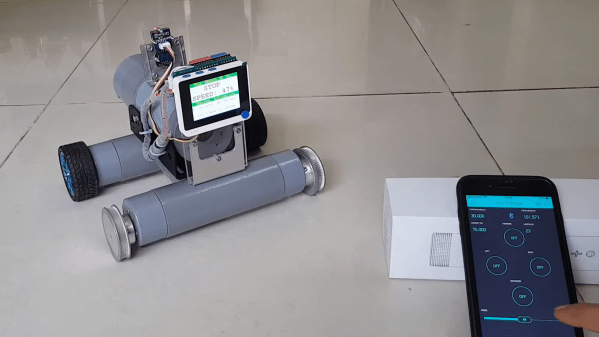
The little remote-control car is built around a Seeed Wio Terminal. This is a microcontroller platform that comes with a screen already attached, along with wireless hardware baked in and Grove connectors for hooking up external modules. Thus, the car adds a DHT11 temperature and humidity sensor, along with a BMP280 air pressure sensor using the Grove connectors.
Driving the car is done via a Blynk smartphone app that communicates with the Wio Terminal. Small DC motors at each wheel are driven via a DFRobot quad-motor shield. With the built-in screen, the RC car displays commands received from the smartphone app, as well as the temperature, humidity and pressure in the immediate environment.
We really like the simple PVC-based chassis design, and it’s a straightforward project that demonstrates how to build a Bluetooth-controlled car. Data collected by the sensors is also visible on the smartphone app, so if you need to sample conditions in the next room without getting off the couch, you could do that pretty easily.
Projects like these are a good way to get familiar with working with motors and sensors. It’d be a great base for simple robotics development, too. We’ve featured builds from [TUENHIDIY] before, too, like this great rotary plotter that can draw on bottles. Video after the break.
Continue reading “Bluetooth RC Car Packs In A Few Sensors” →