Anyone who has delved into DIY wheels knows that they are a trickier than it may seem, especially if the wheels aren’t just for show and need to provide things like decent traction and durability. 3D printers have helped a lot, but they’re not a cure-all.
Anyone who has delved into DIY wheels knows that they are a trickier than it may seem, especially if the wheels aren’t just for show and need to provide things like decent traction and durability. 3D printers have helped a lot, but they’re not a cure-all.
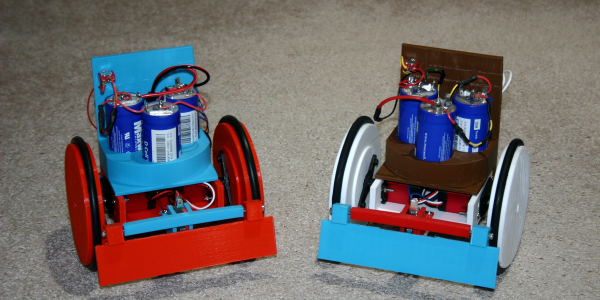
Check out how [Robert K.] makes wheels from segments of automotive silicone hose, which are constructed with fibers embedded within them for durability and structure. Not only are these hoses easily sourced, but the silicone makes a great wheel surface and the hoses themselves are highly durable. He uses a 3D printed jig to cut a slice of hose that press-fits perfectly onto a 3D printed hub. [Robert] finds that a 28 mm hose pulled over a 35 mm diameter wheel is a perfect fit.
These wheels are for a Beetleweight class combat robot, which are limited to three pounds (1.36 kg) or less. You can see some video of [Robert]’s previous Beetleweight robot named ‘Bourbon’, and we have featured what goes into the even-smaller Antweight class (one pound or less) in the past.