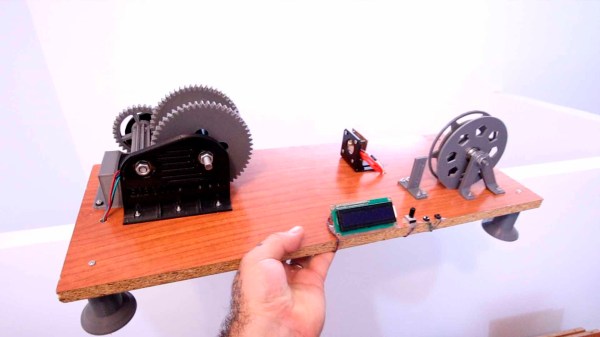
[Ondřej Šraitr] has several videos, including the one you can watch below, about his PETamentor2 — a machine for turning PET bottles into printable filament. You can grab the files on Thingiverse, and there aren’t many parts you have to buy.
The device looks good, and from the videos, it appears to work well. A blade slices the bottle into a strip that feeds what is essentially a hot end that pushes out the filament. The blade is adjustable to set the amount of plastic fed at any given time which is important because you need enough to create a solid piece of filament but not any more than that.
Surprisingly, the bill of materials doesn’t include any sort of microcontroller. There is a PWM speed control module to drive the 7 RPM motor and a temperature controller. Of course, you need a power supply, a heater block and a heater. The nozzle is, oddly enough, a standard 0.4 mm nozzle. You drill it out to 1.5 mm and die swell takes care of getting to the final 1.75 mm size.
It takes about 45 minutes to eat up what looks like a 1-liter bottle. The filament produced looks good in the video. We aren’t sure, but we think that was a roll of solder used as a ballast weight on top of the bottle keeping it moving in a downward direction. Bottles imply wetness, of course, so after producing the filament, it needs to be dried.
This is the second version of the machine and we were a bit surprised that we never saw a video of the filament in use. But it looks like it would work and it isn’t like we haven’t seen this technique used before. In fact, we’ve seen it several times. We can’t remember any that looked as stylish as the PETamentor2, though, and we are interested to hear about anyone’s results with the resulting filament.
Continue reading “PETamentor2 Is Latest To Turn Bottles Into Filament” →