The Russians were the first to send a dog into space, the first to send a man, and the first to send a woman. However, NASA sent the first humanoid robot to the International Space Station. The Russians, though, want to send FEDOR and proclaim that while Robonaut flew as cargo, a FEDOR model — Skybot F-850 — will fly the upcoming MS-14 supply mission as crew.
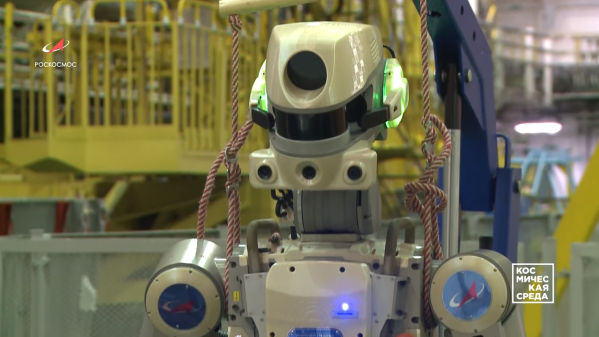
Defining the term robot can be tricky, with some thinking a proper robot needs to be autonomous and others seeing robotics under human control as enough. The Russian FEDOR robot is — we think — primarily a telepresence device, but it remains an impressive technical achievement. The press release claims that it can balance itself and do other autonomous actions, but it appears that to do anything tricky probably requires an operator. You can see the robot in ground tests at about the one minute mark in the video below.