Firefighting is a difficult and dangerous job, which puts humans on the front line to save life and property on a regular basis. It’s a prime candidate for some robot helpers, and [Ivan] has stepped in with a fun build that, while it won’t be serving in your municipal department any time soon, gets us thinking about the possibilities.
It’s a radio controlled robot with an Arduino Uno for the brains. A couple of motor driver boards are used to run four windscreen wiper motors for propulsion. Long before the days of online shopping, the wiper motor was a hacker staple – a cheap, readily available high torque motor that could be easily driven for a range of hobby projects. They say only 90’s kids remember.
As far as water delivery goes, this robot is a little short on credentials, carrying only 1 litre of water. However, we appreciate [Ivan]’s use of a Tupperware container as a tank – with a few add-on fittings, this could be a great way to hold water in other projects. The small DC-powered pump is controlled by an industrial solid state relay – a good choice for a robot that may get wet. There’s an onboard CO2 extinguisher as well, but it’s sadly not plumbed into anything just yet.
This build is an [Ivan] classic – big, fun, and 3D printed on a much larger scale then we’re used to. It’s a strong follow up to his impressive tank build we saw earlier. Video after the break.
When is paper maché not paper maché? When it is cloth, of course. [Dan Reeder] has been putting his own spin on paper maché art since the 70s and demonstrates the technique of using cloth for tricky spots in his outstanding sculpture of an Ice Dragon. Thin strips of cloth are used just as paper would be, but give a much different structure and grant natural-looking folds to spots like eyelids, nostrils, and lips.
[Dan] feels that paper maché is an under-utilized and under-rated medium, and he puts out some stunning work on his blog as well as his YouTube channel. What’s great to see are his frank descriptions and explanations of what does and doesn’t work, and he’s not afraid to try new things and explore different ways to approach problems.
Enterprising hackers may not pick paper maché as their first choice to create creating custom enclosures, but it can be done and the accessibility and ease of use of the medium are certainly undeniable. One never knows when a tool or technique may come in handy.
[Timo] recently purchased himself a Acton Blink Qu4tro electric skateboard. Performance-wise, the board was great, but the controller left a lot to be desired. There were issues with pairing, battery displays, and just general rideability. Like any good hacker, he decided some reverse engineering was in order, and got to work.
Initial results were disheartening – the skateboard relies on various chips of Chinese origin for which documentation proved impossible to come by. However, as it turned out, the board and controller communicated using the common NRF24L01+ transceiver.
Initial work focused on understanding the pairing process and message protocol. With that done, [Timo] decided the best course of action was to redevelop a controller from scratch, using an Arduino Nano and NRF24L01+ to do the job. [Timo]’s Open esk8 controller improves driveability by removing delays in message transfer, as well as improving on the feel of the controller with a 3D printed chassis redesign.
[Timo] now has a much more usable skateboard, and has racked up over 200 miles in testing since the build. However, if you fancy converting your existing board to electric, check out this project.
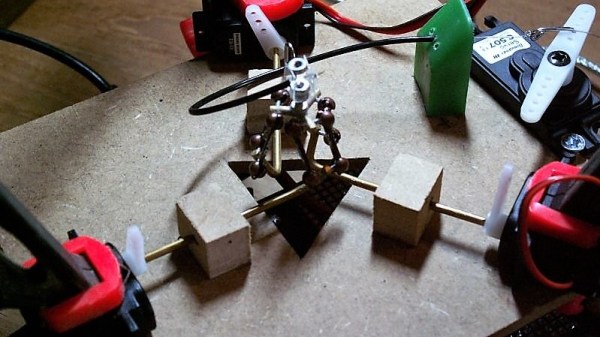
There’s something mesmerizing about delta robots. Whether they are used at a stately pace for a 3D-printer or going so fast you can barely see them move in a pick and place machine, the way that three rotary actuators can work together to produce motion in three axes is always a treat to watch. Especially with a delta robot as small as this one.
[KarelK16] says this is one of those “just because I can” projects with no real application. And he appears to have been working on it for a while; the video below is from eight years ago. Regardless, the post is new, and it’s pretty interesting stuff. The tiny ball joints used in the arms are made from jewelry parts; small copper crank arms connect the three upper arms to micro-servos. The manipulator [KarelK16] attached is very clever, too – rather than load down the end of the arms with something heavy, a fourth servo opens an closes a flexible plastic grasper through a Bowden cable. It’s surprisingly nimble, and grasps small objects firmly.
There are certainly bigger deltas – much bigger – and more useful ones, too, but we really like this build. And who knows – perhaps model robotics will join model railroading as a hobby someday. If it does, [KarelK16]’s diminutive delta might be the shape of things to come.
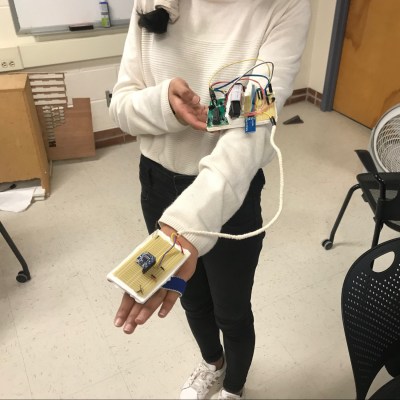
The hand controller lives on a protoboard for ease of testing.
The project consists of a small car, driven with electric motors at the rear, with a servo-controlled caster at the front for steering. Controlled is provided through PIC32 microcontroller receiving signals via Bluetooth. The car is commanded with a hand controller, quite literally — consisting of an accelerometer measuring pitch and roll position of the user’s hand. By tilting the hand left and right affects steering, while the hand is rotated fore and aft for throttle control. Video after the break.
The project was built for a course at Cornell University, and thus is particularly well documented. It provides a nice example of reading sensor inputs and transmitting/receiving data. The actually microcontroller used is less important than the basic demonstration of “Hello World” with robotics concepts. Keep this one in your back pocket for the next time you want to take a new chip for a spin!
There are a range of integrated circuits that most of us would regard as definitive examples of their type, devices which became the go-to for a particular function and which have entered our collective consciousness as electronics enthusiasts. They have been in production since the early days of consumer integrated circuits, remaining in use because of a comprehensive understanding of their characteristics among engineers, and the job they do well.
You can probably name the ones I’m going to rattle off here, the µA741 op-amp designed by David Fullagar for Fairchild in 1968, the NE555 timer from Hans Camenzind for Signetics in 1971, and a personal favourite, Bob Widlar’s µA723 linear regulator for Fairchild in 1967. There may be a few others that readers will name in the comments, but there’s one that until today it’s likely that few of you would have considered. Texas Instruments’ 5400 and 7400 TTL quad 2-input NAND gate has been in continuous production since 1964 and is the progenitor of what is probably the most numerous breed of integrated circuits, yet it doesn’t trip off the tongue when listing famous chips, and none of us can name its designer. So today we’re turning the spotlight on this neglected piece of silicon, and trying to bring it the adulation it deserves. Continue reading “The 7400 Quad 2-Input NAND Gate, A Neglected Survivor From A Pre-Microprocessor World”→
Towards the end of the Second World War, as the United States considered their options for a possible invasion of Japan, there was demand for a new fighter that could escort long range bombers on missions which could see them travel more than 3,200 kilometers (2,000 miles) without refueling. In response, North American Aviation created the F-82, which essentially took two of their immensely successful P-51 fighters and combined them on the same wing. The resulting plane, of which only 272 were built, ultimately set the world record for longest nonstop flight of a propeller-driven fighter at 8,129 km (5,051 mi) and ended up being the last piston engine fighter ordered by the United States Air Force.
The project provides a fascinating look at what it takes to not only return a 70+ year old ultra-rare aircraft to fully functional status, but do it in a responsible and historically accurate way. With only four other intact F-82’s in the world, replacement parts are obviously an exceptional rarity. The original parts used to rebuild this particular aircraft were sourced from literally all over the planet, piece by piece, in a process that started before [Tom] even purchased the plane itself.
In a way, the search for parts was aided by the unusual nature of the F-82, which has the outward appearance of being two standard P-51 fighters, but in fact utilizes a vast number of modified components. [Tom] would keep an eye out for parts being sold on the open market which their owners mysteriously discovered wouldn’t fit on a standard P-51. In some cases these “defective” P-51 parts ended up being intended for the Twin Mustang project, and would get added to the collection of parts that would eventually go into the XP-82 restoration.
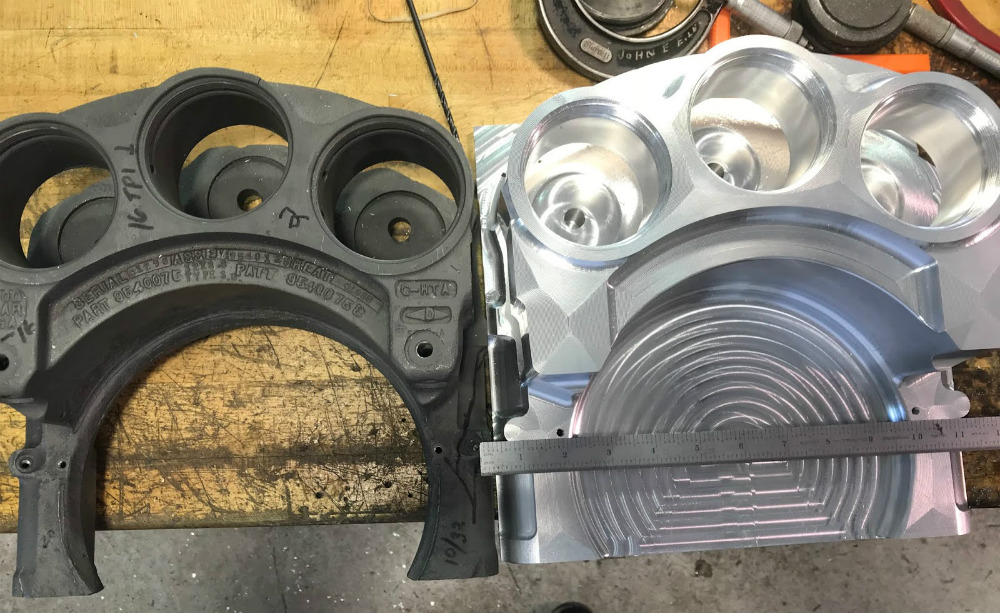
For the parts that [Tom] couldn’t find, modern manufacturing techniques were sometimes called in. The twin layout of the aircraft meant the team occasionally had one component but was missing its counterpart. In these cases, the original component could be carefully measured and then recreated with either a CNC mill or 3D printed to be used as a die for pressing the parts out of metal. In this way the team was able to reap the benefits of modern production methods while still maintaining historical accuracy; important on an aircraft where even the colors of the wires used in the original electrical system have been researched and faithfully recreated.
We’ve seen plenty of restorations here at Hackaday, but they tend to be of the vintage computer and occasionally Power Wheels variety. It’s interesting to see that the same sort of techniques we apply to our small scale projects are used by the pros to preserve pieces of history for future generations.


 [Dan] feels that paper maché is an under-utilized and under-rated medium, and he puts out some stunning work on
[Dan] feels that paper maché is an under-utilized and under-rated medium, and he puts out some stunning work on