If you’re like us, a body of water is a source of wonder and awe. The wonder comes from imagining what lies hidden below the surface, and the awe is from the fear of trying to find out and becoming one of those submerged objects on a permanent basis. So if you want to explore the depths in relative comfort and safety, a DIY remotely operated underwater vehicle might be the thing you need to build.
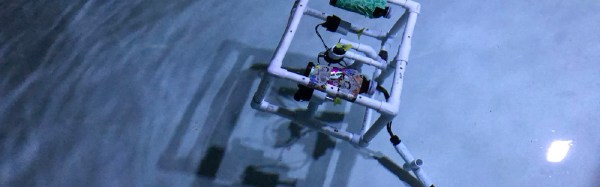
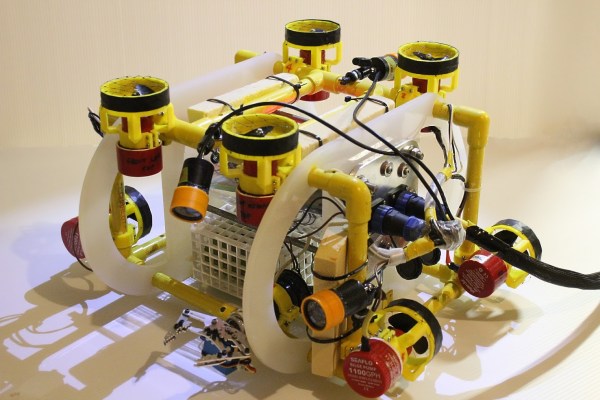
Most ROV builds these days seem to follow more or less similar designs, which is probably because they all share project goals similar to those of [dcolemans]: build something to take a look around under the water, make it easy to operate, and don’t spend a ton of money. To achieve that, he used 1/2″ PVC pipe and fittings to build the frame and painted it yellow for visibility. A dry tube for the electronics was fashioned from 4″ ABS pipe. The positive buoyancy provided by the dry tube is almost canceled out by the water flooding the frame through weep holes and the lead shot ballast stored in the landing skids. Propulsion is provided by bilge pump cartridges with 3D-printed ducted propellers. A nice touch is a separate topside control box with a screen for the ROV’s camera that talks to a regular RC controller, along with simplified controls and automatic station keeping. Check out the recent swimming pool test in the video below.
There’s a lot going on under the sea, and plenty of ways to explore it. You could deploy sensors shaped like clams, zap underwater lice with lasers, or even glide your way to a Hackaday Prize.
Continue reading “DIY Submersible Aims For Low Cost, Ease Of Operation”