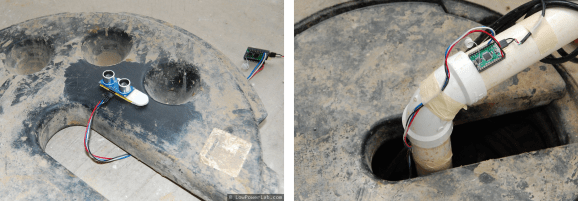
We’ve got some friends who have two sump pumps. One is a backup and sounds an alarm when it is switched on. But this only works as long as they’re home to hear it. [Felix Rusu] came up with a solution what will text him if the sump pump fails. This way he can head home, or call someone to check in on the problem if he’s away.
We saw a pretty complicated monitoring system back in January. This one uses a single ultrasonic rangefinder which we think is much simpler. It’s accurate to about 1cm and is simple to use — it’s very popular with the hobby electronics crowd which helps with price and availability of sample code. We hem and haw about the use of a Raspberry Pi board with the project. On the one hand it’s a cheap way to get the sensor on the network and provides the infrastructure you need to send any number of alerts. On the other hand, it’s a lot of power for this particular application. But we figure it can be extended to monitor other utilities in [Felix’s] home, like a sensor to alert him of a leaking water heater. And we think everyone can argue that a monitor like this is well worth the time and effort he spent to develop it.