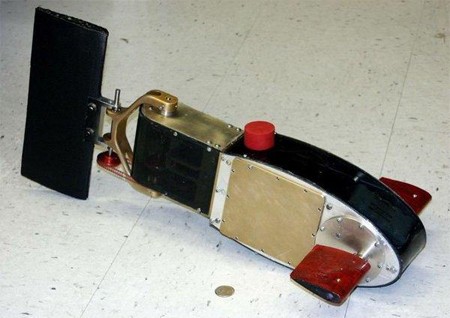
This rig looks so good it’s hard to believe this is the first ROV that [DZL] has ever built. It houses an HD camera which feeds the display at the operator’s station. You can see the controller to the left of that screen which uses a joystick and buttons to pilot the underwater vessel.
In order to simplify construction, [DZL] decided not to use propellers. The problem with that technique is that you need to have bearings that will allow the propeller shafts to turn without letting water in. Propulsion is instead provided by a group of small water pumps whose intake is on one end and outflow is on the other. These are mounted at various places on the body and each have one power cable that connects to the control circuitry in the main housing. The passage of cables through the enclosure is another possible leak point, but [DZL] found some off the shelf bushings that ended up making it pretty easy.
The link at the top is a round-up of all the different project posts. For us, the most interesting Flickr set is the one showing how the enclosure is put together. There is also a pretty neat dive video after the break that shows the craft being tested underwater.