LEGOs are the first window into making something in your head become real for many makers. The Verge dug into how a LEGO set itself goes from idea to the shelves.
While most sets come from the minds of LEGO designers, since 2008, fans can submit their own sets to LEGO Ideas for the chance to become a real product. In this case, we follow the journey of [Marc Corfmat]’s Polaroid OneStep Camera from his initial attempts at LEGO stardom with his brother [Nick] to the current set that took off.
While the initial idea and build are the seed for a new set, once the project is in the hands of LEGO, designers meticulously make revision after revision to ensure the set is enjoyable to build and any moving parts continue to function for thousands of cycles. This is all weighed against the total cost of the BOM as well as any licensing required for intellectual property. One particularly interesting part of the article is how designers at LEGO are afforded a certain number of “frames” for custom bricks which leads to some interesting hacks and collaboration as all good constraints do.
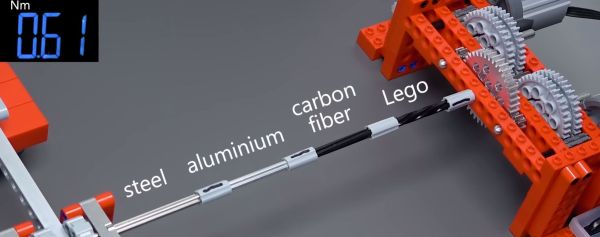
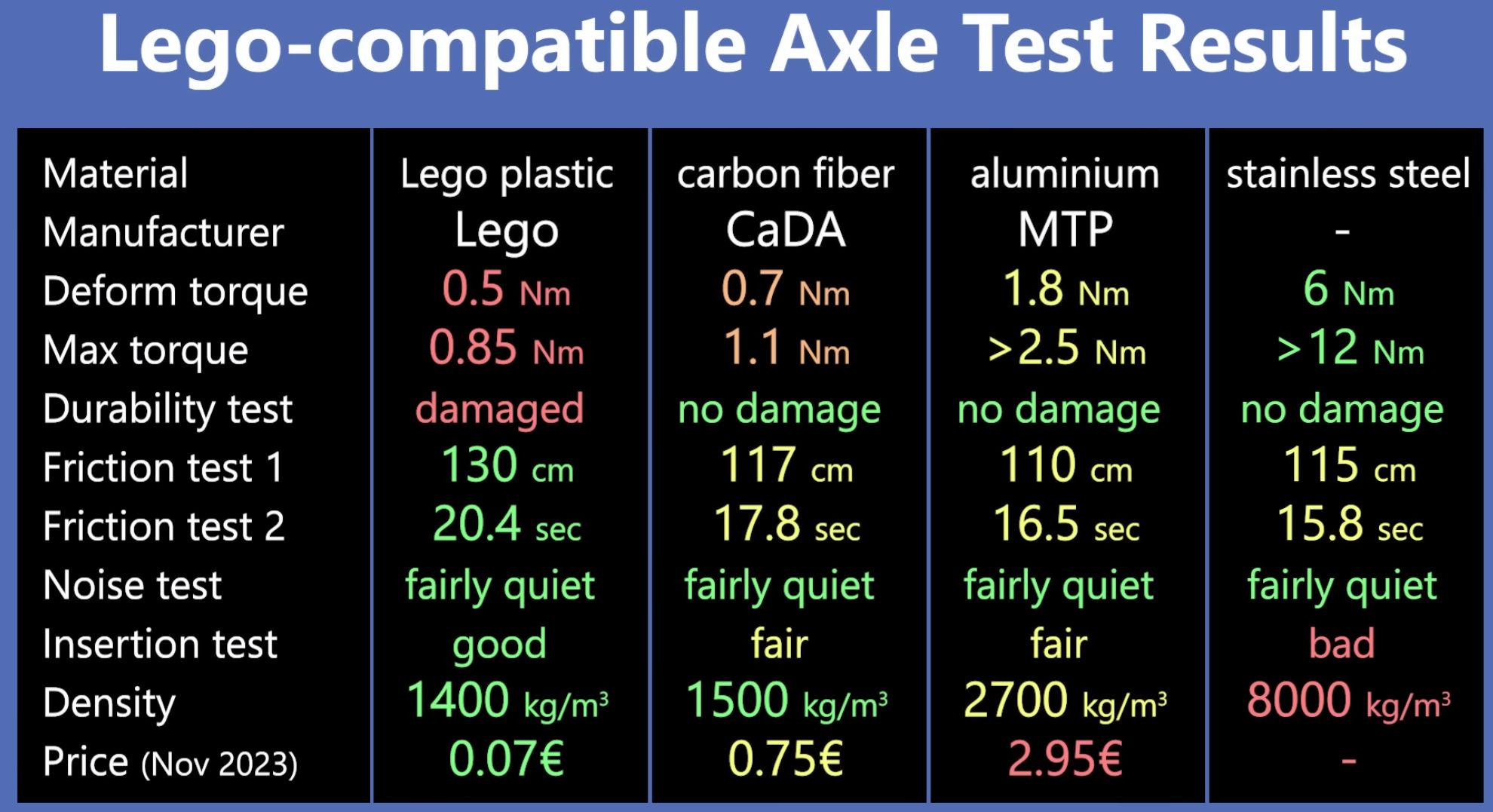
For more LEGO hacks, checkout LEGO’s long lost cousin, testing LEGO-compatible axle materials, or these giant LEGO-like pieces.