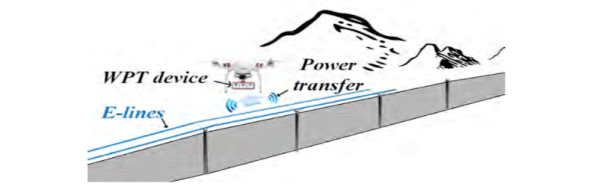
It makes sense to use drones to patrol borders or perimeters. But there’s a problem. Drones have to carry batteries or fuel and mostly have a short operating time. A new paper from the University of Houston proposes a solution by recharging drones in flight using a novel wireless charging mechanism. What’s the cost? Another paper explores the economics of the approach.
The system relies on electric lines running along a border wall feeding wireless power transfer devices that allow the drone to recharge in flight. This is akin, we think, to an electric train that takes power from the third rail except, in this case, the power rail is wireless. Also, the drone would still have batteries to enable it to go off the rail as needed.
The paper mentions that the source power could be from wind or solar, but that’s not necessarily important and it also requires a storage battery in the system that you could omit if using conventional power. In addition, you’d think batteries and solar panels might be targets for theft in remote areas.
The paper mentions that another alternative is to simply have charging towers along the wall where drones land to recharge. This is easier, we think, but it does put the drone out of full operation status while charging. On the other hand, cheap drones could work in shifts to cover an area, so it seems like that might be a better solution than charging while flying.
What do you think? How would you make a long-duration drone? Fuel cells? In-flight battery swapping from a refueling drone? Laser power? Maybe a magnetic battery swap system where the drone swoops over a charger to drop off and pick up a fresh battery? Let us know what you would try or — even better — what you have done.
For as much of a genius as Leonardo da Vinci obviously was, modern eyes looking upon his notebooks from the 1400s tend to see his designs as somewhat quaint. After all, his concept of a vehicle armored with wood would probably only have survived the archers and pikemen of a Renaissance battlefield, and his curious helicopter driven by an Archimedes screw would certainly never fly, right?
Don’t tell that to [Austin Prete] and his team from the University of Maryland, who’ve built a da Vinci-style quadcopter that actually flies. Called the “Crimson Spin”, the quad is based on a standard airframe and electronics. Details are sparse — the group just presented the work at a vertical flight conference — but it appears the usual plastic props are replaced with lightweight screws made from wire and some sort of transparent plastic membrane. Opposing pairs of screws have the opposite handedness, which gives the quad yaw control. There’s a video embedded in the link above that shows the quad being tested both indoors and out, and performing surprisingly well. We’d imagine that Crimson Spin might not do so well on a windy day, given the large wind cross-section those screws present, but the fact it got off the ground at all is cool enough. It kind of makes you wonder where we’d be today if da Vinci had access to BLDCs.
For as fanciful as da Vinci’s designs can be, we’ve seen a fair number of attempts to recreate them in modern materials. His cryptex is a perennial favorite for hackers, and his bizarre piano-esque “viola organista” has been attempted at least once.
[Nicholas Rehm] works during the day at the Applied Physics Laboratory at Johns Hopkins, Maryland, so has considerable experience with a variety of UAV applications. The question arose about how the perseverance mars rover landing worked, which prompted [Nicholas] to hang a rock under his drone, attached via a winch. This proved to be interesting. But what is more interesting for us, is what happens when you try to attach an inverted pendulum to the top of a drone in flight? (video embedded, below)
This is a classic control theory problem, where you need to measure the angle of the pendulum with respect to the base, and close the loop by calculating the necessary acceleration from the pendulum angle. Typically this is demonstrated in one dimension only, but it is only a little more complicated to balance a pendulum with two degrees of freedom.
[Nicholas] first tried to derive the pendulum angle by simply removing the centering springs from an analog joystick, and using it to attach the pendulum rod to the drone body. As is quite obvious, this has a big drawback. The pendulum angle from vertical is now the sum of the joystick angle and the drone angle, which with the associated measurement errors, proved to be an unusable setup. Not to be discouraged, [Nicholas] simply added another IMU board to the bottom of the pendulum, and kept the joystick mechanism as a pivot only. And, as you can see from the video after the break, this indeed worked.
The flight controller is [Nicholas’] own project, dRehmFlight (GitHub), which is an Arduino library intended for the Teensy 4.0, using the ubiquitous MPU6050 6-DOF IMU. [Nicholas] also made an intro video for the controller, which may prove instructive for those wishing to go down this road to build their own VTOL aircraft. The code for pendulum experiment is not available at the time of writing, perhaps it will hit the GitHub in the future?
While it’s great to be experienced and have a ton of specialist knowledge needed to solve a problem, there’s something liberating about coming at things from a position of ignorance. Starting at ground zero can lead you down the path less traveled, and reveal solutions that might otherwise not have presented themselves. And, if [Robin Debreuil]’s exploration of the “minimum viable quadcopter” is any example, some pretty fun failure modes too.
The minimum viable product concept is nothing new of course, being a core concept in Lean methodologies and a common practice in many different industries. The idea of building an MVP is to get something working and in the hands of users, who will then give you feedback on everything wrong with it, plus, if you’re lucky, what you got right. That feedback informs the next design, which leads to more feedback and a whole iterative process that should design the perfect widget.
In [Robin]’s case, he wanted to build a quadcopter, but didn’t know where to start. So his first version was as simple as possible: a motor with a propellor and a small LiPo battery. No chassis, no control electronics — nothing. And it worked just about as well as expected. But fixing that problem led to different designs, the process of which was fascinating — we especially liked the quad with opposing motors controlled by mercury tilt switches to sense attitude changes.
In the end, [Robin] took a more conventional tack and used a microcontroller and BetaFlight to get his popsicle stick and hot glue UAV airborne. But the decision to start with a minimum viable design and iterate from there was a powerful learning experience in tune with [Robin]’s off-beat and low-key outlook, which we’ve seen before with his use of bismuth for desoldering and his scratch-off PCBs.
That collective “Phew!” you heard this week was probably everyone on the Mars Ingenuity helicopter team letting out a sigh of relief while watching telemetry from the sixth and somewhat shaky flight of the UAV above Jezero crater. With Ingenuity now in an “operations demonstration” phase, the sixth flight was to stretch the limits of what the craft can do and learn how it can be used to scout out potential sites to explore for its robot buddy on the surface, Perseverance.
While the aircraft was performing its 150 m move to the southwest, the stream from the downward-looking navigation camera dropped a single frame. By itself, that wouldn’t have been so bad, but the glitch caused subsequent frames to come in with the wrong timestamps. This apparently confused the hell out of the flight controller, which commanded some pretty dramatic moves in the roll and pitch axes — up to 20° off normal. Thankfully, the flight controller was designed to handle just such an anomaly, and the aircraft was able to land safely within five meters of its planned touchdown. As pilots say, any landing you can walk away from is a good landing, so we’ll chalk this one up as a win for the Ingenuity team, who we’re sure are busily writing code to prevent this from happening again.
If wobbling UAVs on another planet aren’t enough cringe for you, how about a blind mechanical demi-ostrich drunk-walking up and down a flight of stairs? The work comes from the Oregon State University and Agility Robotics, and the robot in question is called Cassie, an autonomous bipedal bot with a curious, bird-like gait. Without cameras or lidar for this test, the robot relied on proprioception, which detects the angle of joints and the feedback from motors when the robot touches a solid surface. And for ten tries up and down the stairs, Cassie did pretty well — she only failed twice, with only one counting as a face-plant, if indeed she had a face. We noticed that the robot often did that little move where you misjudge the step and land with the instep of your foot hanging over the tread; that one always has us grabbing for the handrail, but Cassie was able to power through it every time. The paper describing how Cassie was trained is pretty interesting — too bad ED-209’s designers couldn’t have read it.
So this is what it has come to: NVIDIA is now purposely crippling its flagship GPU cards to make them less attractive to cryptocurrency miners. The LHR, or “Lite Hash Rate” cards include new-manufactured GeForce RTX 3080, 3070, and 3060 Ti cards, which will now have reduced Ethereum hash rates baked into the chip from the factory. When we first heard about this a few months ago, we puzzled a bit — why would a GPU card manufacturer care how its cards are used, especially if they’re selling a ton of them. But it makes sense that NVIDIA would like to protect their brand with their core demographic — gamers — and having miners snarf up all the cards and leaving none for gamers is probably a bad practice. So while it makes sense, we’ll have to wait and see how the semi-lobotomized cards are received by the market, and how the changes impact other non-standard uses for them, like weather modeling and genetic analysis.
Speaking of crypto, we found it interesting that police in the UK accidentally found a Bitcoin mine this week while searching for an illegal cannabis growing operation. It turns out that something that uses a lot of electricity, gives off a lot of heat, and has people going in and out of a small storage unit at all hours of the day and night usually is a cannabis farm, but in this case it turned out to be about 100 Antminer S9s set up on janky looking shelves. The whole rig was confiscated and hauled away; while Bitcoin mining is not illegal in the UK, stealing the electricity to run the mine is, which the miners allegedly did.
And finally, we have no idea what useful purpose this information serves, but we do know that it’s vitally important to relate to our dear readers that yellow LEDs change color when immersed in liquid nitrogen. There’s obviously some deep principle of quantum mechanics at play here, and we’re sure someone will adequately explain it in the comments. But for now, it’s just a super interesting phenomenon that has us keen to buy some liquid nitrogen to try out. Or maybe dry ice — that’s a lot easier to source.
It’s the same on Mars as it is here — just when you’re getting used to your job, the bosses go and change things up.
At least that’s our read on the situation at Jezero crater, where the Mars Ingenuity helicopter has just had its mission upgraded and extended. In a Friday morning press conference, the Ingenuity flight team, joined by members of the Perseverance team and some NASA brass, made the announcement that Ingenuity had earned an extra 30 sols of flight time, and would be transitioned from a mere “technology demonstrator” to an “operations demonstration” phase. They also announced Ingenuity’s fourth flight, which concluded successfully today, covering 266 meters and staying airborne for 117 seconds.
Bad news, Martian helicopter fans: Ingenuity, the autonomous helicopter that Perseverance birthed onto the Martian surface a few days ago, will not be taking the first powered, controlled flight on another planet today as planned. We’re working on a full story so we’ll leave the gory details for that, but the short version is that while the helicopter was undergoing a full-speed rotor test, a watchdog timer monitoring the transition between pre-flight and flight modes in the controller tripped. The Ingenuity operations team is going over the full telemetry and will reschedule the rotor test; as a result, the first flight will occur no earlier than Wednesday, April 14. We’ll be sure to keep you posted.
Anyone who has ever been near a refinery or even a sewage treatment plant will have no doubt spotted flares of waste gas being burned off. It can be pretty spectacular, like an Olympic torch, but it also always struck us as spectacularly wasteful. Aside from the emissions, it always seemed like you could at least try to harness some of the energy in the waste gasses. But apparently the numbers just never work out in favor of tapping this source of energy, or at least that was the case until the proper buzzword concentration in the effluent was reached. With the soaring value of Bitcoin, and the fact that the network now consumes something like 80-TWh a year, building portable mining rigs into shipping containers that can be plugged into gas flaring stacks at refineries is now being looked at seriously. While we like the idea of not wasting a resource, we have our doubts about this; if it’s not profitable to tap into the waste gas stream to produce electricity now, what does tapping it to directly mine Bitcoin really add to the equation?
What would you do if you discovered that your new clothes dryer was responsible for a gigabyte or more of traffic on your internet connection every day? We suppose in this IoT world, such things are to be expected, but a gig a day seems overly chatty for a dryer. The user who reported this over on the r/smarthome subreddit blocked the dryer at the router, which was probably about the only realistic option short of taking a Dremel to the WiFi section of the dryer’s control board. The owner is in contact with manufacturer LG to see if this perhaps represents an error condition; we’d actually love to see a Wireshark dump of the data to see what the garrulous appliance is on about.
As often happens in our wanderings of the interwebz to find the very freshest of hacks for you, we fell down yet another rabbit hole that we thought we’d share. It’s not exactly a secret that there’s a large number of “Star Trek” fans in this community, and that for some of us, the way the various manifestations of the series brought the science and technology of space travel to life kick-started our hardware hacking lives. So when we found this article about a company building replica Tricorders from the original series, we followed along with great interest. What we found fascinating was not so much the potential to buy an exact replica of the TOS Tricorder — although that’s pretty cool — but the deep dive into how they captured data from one of the few remaining screen-used props, as well as how the Tricorder came to be.
And finally, what do you do if you have 3,281 drones lying around? Obviously, you create a light show to advertise the launch of a luxury car brand in China. At least that’s what Genesis, the luxury brand of carmaker Hyundai, did last week. The display, which looks like it consisted mostly of the brand’s logo whizzing about over a cityscape, is pretty impressive, and apparently set the world record for such things, beating out the previous attempt of 3,051 UAVs. Of course, all the coverage we can find on these displays concentrates on the eye-candy and the blaring horns of the soundtrack and gives short shrift to the technical aspects, which would really be interesting to dive into. How are these drones networked? How do they deal with latency? Are they just creating a volumetric display with the drones and turning lights on and off, or are they actually moving drones around to animate the displays? If anyone knows how these things work, we’d love to learn more, and perhaps even do a feature article.