As we start to get into the swing of The Hackaday Prize we want to take some time to talk to the judges.
As we start to get into the swing of The Hackaday Prize we want to take some time to talk to the judges.
[Ian Lesnet] is an accomplished hardware developer. He is, of course, near and dear to our hearts as a Hackaday writer emeritus.
During his time here he came up with an idea for an amazing tool that would let you work with components using a multitude of protocols before heading off to write your firmware. The tool was called the Bus Pirate and [Ian] built an formidable Open Hardware community up around this and several other tools and unique ideas.
[Hackaday] Why do you think people should put together an entry for The Hackaday Prize?
[Ian] There’s never a bad time to hack something together, but with an incentive like SPACE!!! how can you refuse?
[Hackaday] If you could enter, what style of project would you build and where would you try to go with the idea?
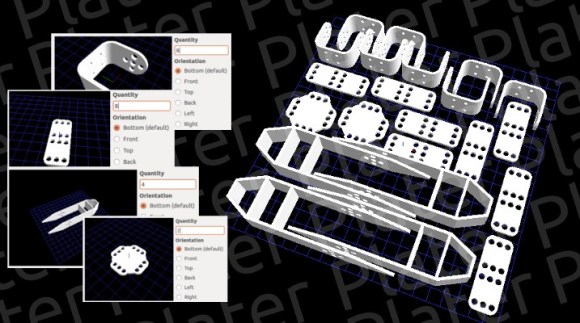
[Ian] We like to make electronics hardware that helps debug stuff, but lately we’re rocking more potentially deadly machines that do things. I’d finish up our death chomp robot that slices and dices reels of components into handy kit-sized lengths, while printing values and part numbers on the back paper. Definitely not a winner, but it looks great when it’s chewing parts!
[Hackaday] Is there anything that participants can do with their project write-ups to make your life easier as an adjudicator?
[Ian] Writing and English classes are a special hell for me, but there are some good tips for clear communication. I always start with an overview – “tell them what you’re going to tell them”. This usually means a description of the hack, the major components used, and how they work together. The introduction should have enough info that another hacker can piece everything together without digging through the whole writeup. An overview illustration or hand drawing explaining the methodology is really helpful for visualizing a complex hack.
[Hackaday] You have vast experience with Open Hardware projects. I think one of the tough things for beginners is navigating the Open Hardware licenses available. Do you have any advice for noobs to learn more about licenses and perhaps on narrowing them down?
[Ian] If you want the world to be a better place put all your work in the Public Domain (Creative Commons Zero) for anyone to use however they want. That’s the license with the least bullshit attached. If you have a billion dollar secret idea by all means keep it in your closet and show it to no one, because that’s about the only thing that will protect it from innovators and imitators. Other licenses fall somewhere in the middle, but for our stuff we’ve decided to go Public Domain wherever possible.
[Hackaday] We’ve seen a lot of collaborative projects come out of DP. Do you have any advice you can share for finding collaborators for a hardware project?
[Ian] The best advise I’ve heard (not mine) is to wait until a project is done to decide ownership share. Hackers are quick to settle on equal ownership, but during the project (or the long haul support period) collaborators may loose interest or be unable to continue as planned. With equal ownership remaining team members must finish the whole project just get a portion of the future gains. It demotivates the remaining team members and kills momentum. By waiting to see how things play out you’ll have a much better idea how to divide ownership for a successful long term collaboration.
[Hackaday] Can you name a favorite piece of bench equipment and tell us why it is at the top of your list?
[Ian] For years I used $10 “fire starter” soldering irons, even for surface mount soldering. An adjustable iron is a nice thing to have though, along with a bright light and head magnifier. A hot air rework station is the tool I can’t live without. It’s for fixing mistakes, which I make constantly, and when it dies everything crashes to a halt.
[Hackaday] What do you think of the evolution of the kit and small-run electronics industry over the last decade? Where would you like to see it go, and do you have any insights about what will get it there, or possible barriers that stand in the way?
[Ian] It’s huge now. Crowd source funding sites alone have become home to how many cool hacks, designs, and projects? Local, short-run assembly houses using a fairly standard set of components would make it a lot easier to get into hardware without 1337 soldering skillz.
 The Hackaday Prize challenges you to build the future of connected devices. Build the best and claim a trip into space or one of hundreds of other prizes.
The Hackaday Prize challenges you to build the future of connected devices. Build the best and claim a trip into space or one of hundreds of other prizes.
 When you think of a robotic arm, you’re probably thinking about digital control, microcontrollers, motor drivers, and possibly a feedback loop. Anyone who was lucky enough to have an Armatron knows this isn’t the case, but you’d still be surprised
When you think of a robotic arm, you’re probably thinking about digital control, microcontrollers, motor drivers, and possibly a feedback loop. Anyone who was lucky enough to have an Armatron knows this isn’t the case, but you’d still be surprised