A pervasive story is that electric vehicles (EVs or BEVs) are actually dirtier than combustion vehicles if charged by a fossil fuel-based electricity grid. A new study reaffirms others that show, at least in the US, EVs have lower lifetime emissions than an internal combustion engine (ICE) vehicle, regardless of the grid mix.
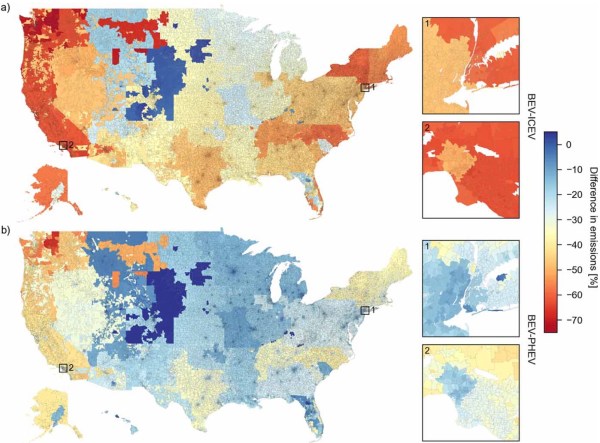
Comparing data on the mix of generation types by ZIP code using data from OpenGrid and eGRID, the researchers were able to create maps and comparisons of the efficiency of ICE, hybrid, plug-in hybrid (PHEV), and electric vehicles. If you want to compare some specific examples, there’s an interactive chart using the research data at carboncounter.com.
PHEVs can achieve 80-90% of the emissions reductions of a full EV in urban environments, but become less beneficial as distances increase or if drivers choose not to charge the battery. The researchers have extensive breakdowns of the comparisons including total cost to operate the vehicle compared with emissions if you want to look more in the paper. Emissions benefits are particularly noticeable in larger vehicle classes or with drivers who put more miles on their cars.
Although it’s unlikely to change anytime soon, they also note that if the industry trend toward larger and larger vehicles were to be reversed, emissions targets could be hit with much fewer hybrids and EVs at the current grid mix. The advantage of full EVs is that they get cleaner as the grid gets cleaner, unlike combustion vehicles that typically get worse as their emissions systems degrade.
If you’re not ready for an EV, maybe you’d like to reuse a pack for a house battery. If you’re feeling more adventurous, then maybe try out an EV conversion that still needs oil changes?















