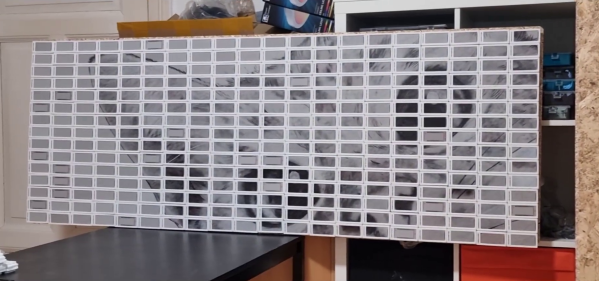
E-paper price tags have become popular for retail stores over the past few years, which is great for hackers since we now have some more cheap commodity hardware to play with. [Aaron Christophel] went all on creating grid displays with E-paper price tags, up to a 20×15 grid.
E-paper price tags are great for these kinds of projects, since they are wireless, lightweight, and can last a long time with the onboard batteries. To mount the individual tags on the plywood backboard,[Aaron] simply glued Velcro to the backboard of the tags. The displays’ firmware is based on the reverse engineering work of [Dmitry Grinberg], flashed to a few hundred tags using a convenient 3D printed pogo pin programming jig. All the displays are controlled via a Zigbee USB dongle plugged into a PC running station software.
[Aaron] is also experimenting with the displays removed from their enclosure and popped into a 3D printed grid frame. The disadvantage is the loss of the battery holders and the antenna, which are both integrated into the enclosure. He plans to get around this by powering the displays from a single large battery, and connecting an ESP32 to the displays via ISP or UART.
This project comes hot on the heels of another E-ink grid display project that uses Bluetooth and a rather clever update scheme.
Continue reading “E-paper Price Tags Combined To Create A Large Wireless Display”