It was the fall of 1965 and Jack Kilby and Patrick Haggerty of Texas Instruments sat on a flight as Haggerty explained his idea for a calculator that could fit in the palm of a hand. This was a huge challenge since at that time calculators were the size of typewriters and plugged into wall sockets for their power. Kilby, who’d co-invented the integrated circuit just seven years earlier while at TI, lived to solve problems.
By the time they landed, Kilby had decided they should come up with a calculator that could fit in your pocket, cost less than $100, and could add, subtract, multiply, divide and maybe do square roots. He chose the code name, Project Cal Tech, for this endeavor, which seemed logical as TI had previously had a Project MIT.
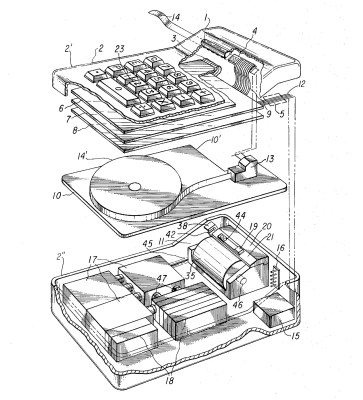
Rather than study how existing calculators worked, they decided to start from scratch. The task was broken into five parts: the keyboard, the memory, the processor, the power supply, and some form of output. The processing portion came down to a four-chip design, one more than was initially hoped for. The output was also tricky for the time. CRTs were out of the question, neon lights required too high a voltage and LEDs were still not bright enough. In the end, they developed a thermal printer that burned images into heat-sensitive paper.
Just over twelve months later, with the parts all spread out on a table, it quietly spat out correct answers. A patent application was filed resulting in US patent 3,819,921, Miniature electronic calculator, which outlined the basic design for all the calculators to follow. This, idea borne of a discussion on an airplane, was a pivotal moment that changed the way we teach every student, and brought the power of solid-state computing technology into everyday life.
Continue reading “The Flight That Made The Calculator And Changed The World”