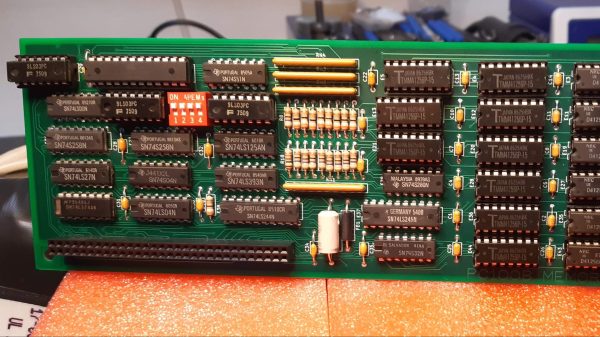
It’s hard enough to get your hands on a forgotten computer from yesteryear. It’s even more difficult to get accessories like RAM expansions and graphics cards, because half the time they’re just discarded as random e-waste when they’re outside of their original context. [na103] has solved this problem for the DEC Rainbow 100 to a degree, by building new RAM expansions and graphics cards from scratch.
In the case of the RAM expansion, the design [na103] built is capable of boosting a Rainbow 100 computer to a full 896KB. This is more than other contemporary IBM machines like the 8088 XT, which had an architecture-enforced limit of 640 KB. It was rebuilt from some notes and original DEC schematics.
Continue reading “Building RAM Expansions For The DEC Rainbow 100”