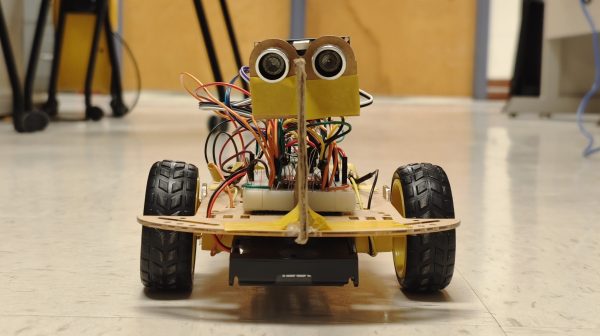
[Clay Builds] found a bit of a gem at a recent auction, picking up a Nomadic Technologies N150 robot for just $100. It actually looks like something out of science fiction, with its cylindrical design, red bumpers, and many sensors. He decided to try and restore the research-grade robot to functionality with the aid of modern hardware.
Right away, it’s clear this was an expensive and serious bit of kit. It’s full of hardcore gears and motors for driving three rubber-tired wheels, each of which has a pivoting mount for steering the thing. Through his research, [Clay] was able to find some ancient websites documenting university work using the robots. His understanding is that the platform was designed for researchers experimenting with simultaneous localization and mapping (SLAM) algorithms, and other robotic navigation tasks.
[Clay] doesn’t just settle for a teardown, though. He’s been able to get the platform running again in one sense, using an Arduino to manually run the robot’s drive controls under the command of a gamepad. Without official software or resources, it’s perhaps unlikely he’ll be able to get the stock hardware to do much without completely rebraining it, so this method makes sense. In future he hopes to get the bumper sensors and sonar modules working too.
It’s a fair effort given [Clay] was working with no documentation and no supporting software. We’ve seen similar efforts for robotic arms before, too. Video after the break.
Continue reading “Weird Trashcan Is Actually Advanced 1990s Robot”