For some car enthusiasts whose passions run towards older vehicles, only originality will do. [RetroJDM] for instance has an RA28 Toyota Celica from the mid 1970s for which he has gone to great lengths to source a pristine center console to replace a damaged original.
There is only one problem with the center console on a 1970s Toyota, it doesn’t have a DIN cut-out for the standard-sized car radios that have become universal in the decades since its manufacture. Instead it has a cut-out for a Toyota-specific radio in the old style with holes for volume and tuning knobs to either side of a protruding center unit that would have contained a tuning dial and a slot for cassettes or maybe 8-track cartridges.
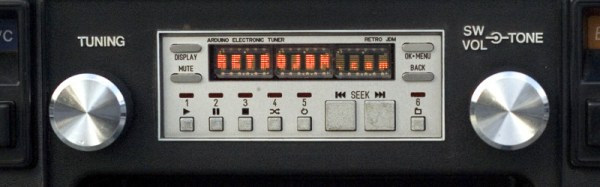
His solution is an interesting one, he’s put together his own car stereo in an enclosure suitable for the Toyota cut-out. Inside the radio there is an Arduino Mega controlling the breakout boards for an Si4703 FM tuner and a VMusic3 MP3/USB music player, and a PT2314 audio processor. For display there is a set of retro LED seven-segment modules, and an MSGEQ7 spectrum analyser. The result is a modern radio with FM, line-input, and MP3 player, with all the functions you’d expect. There is no onboard amplifier though, but this function is fulfilled by an external unit.
The finished unit is topped off with a very professional front panel, which you can see in his demo video below the break.















