In the before-times, back when we could have in-person Hackaday Supercons, there was always the problem of the badge. Making a few hundred small electronic thingies, for a smart but broad range of hackers, is tricky. We always want it to do something all on its own, but also ideally to allow enough free range that the motivated badge hacker can make it into something exquisite. Add in the fact that some attendees are hardware types and some are software types, and toss in a price constraint too. Oh, and it has to look good. Tough problem.
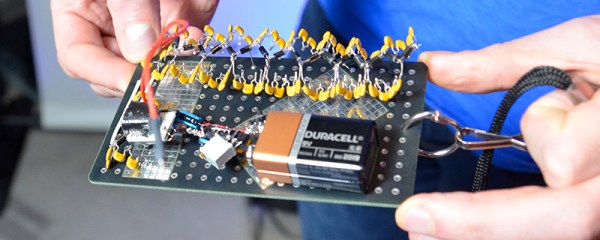
![]() Here’s one extreme solution: the badge at the first Supercon. Faced with essentially zero budget and a tight time constraint, the Hackaday team punted — and produced a prototype board, but had tons of parts on hand for everyone to draw from. And the Hackaday crowd delivered. This was the badge that demonstrates what happens if you leave everything open.
Here’s one extreme solution: the badge at the first Supercon. Faced with essentially zero budget and a tight time constraint, the Hackaday team punted — and produced a prototype board, but had tons of parts on hand for everyone to draw from. And the Hackaday crowd delivered. This was the badge that demonstrates what happens if you leave everything open.
Contrast with the 2018 Belgrade and Supercon badges, which were essentially the same except for color. Here, the hardware interface was limited to a 9-pin header, but the badge itself was a fully functional microcomputer, complete with keyboard and screen. Most of the hacks were written in the native BASIC, though a few hearty souls played around with the alternative CP/M system. This was our most software badge.
Our last in-person badge, the 2019 Supercon badge, was free rein for both hardware and software hackers. The whole thing was based on an FPGA, with completely custom gateware written by Sprite_tm running RISC-V, but based loosely on the Z80 architecture. This was probably also the badge with the highest hurdle to hackers, but you all came through with inventive hardware add-ons, but also a team that came through with a custom Linux OS running on this never-before-seen virtual environment, enabled by a hardware SDRAM cartridge hack.
And finally, even before the global supply crisis, even a tight-knit conference like ours could stock-out the world’s supply of a given component. The untold story of the 2016 Belgrade badge is that Voja Antonic bought out the world’s supply of Kingbright 8×8 common-cathode LED matrixes, and had to redesign the board in the last minute to incorporate the common-anode parts too. (Or was it vice-versa?) Lesson learned, the 2016 Supercon badge traded out the LED modules for discrete LEDs. Not gonna stock out on red LEDs.
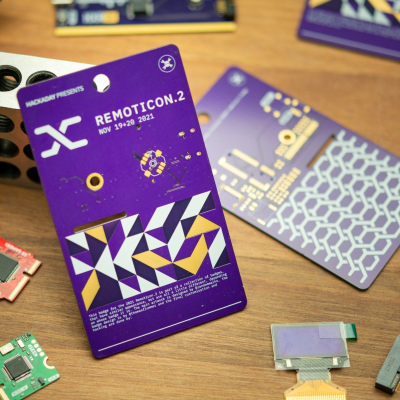
So that’s a long-winded introduction to Thomas Flummer’s unofficial Remoticon 2 badges. With the parts crisis and a virtual conference, you’re on your own to source the badge. Splitting the freedom vs. in-built functionality problem like Samson, he’s got two boards — one a breadboard and the other fully populated. And like all his badges, they both look great. If you manage to get one made by Remoticon next week, be sure to show it off in the Bring-a-Hack. And if you don’t get it in time, bring it by in person to the 2022 Supercon!