If you want to play around with high altitudes, weather balloons are the way to go. With a bit of latex and some helium, it’s possible to scrape up against the edge of space without having to start your own rocketry program. [Blake] was interested in doing just this, and decided to build a near space glider which could capture the journey.
There are certain challenges involved with this flight regime, which [Blake] worked to overcome. There was significant investment in the right antennas and radio hardware to enable communication and control of the aircraft at vast distances. Batteries were chosen for their ability to work at low temperatures in the high altitude environment, and excess heat from the transmitters was use to keep them warm.
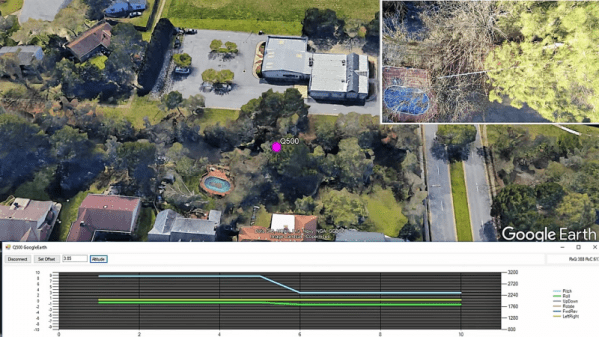
The glider was also fitted with an Ardupilot Mega which would control the gliders’s flight after separation from the lift balloon. [Blake] had some success flying the aircraft at 60,000 feet, but found that due to communications issues, the autopilot was doing a better job. The initial flight was largely a success, with the glider landing just 9 miles off target due to headwinds.
We’ve seen glider builds on other autopilot platforms, too. Video after the break.