When we think about hydrogen and flying machines, it’s quite common to imagine Zeppelins, weather balloons and similar uses of hydrogen in lighter-than-air craft to lift stuff of the ground. But with smaller and more efficient fuel cells, hydrogen is gaining its place in the drone field. Project RACHEL is a hydrogen powered drone project that involves multiple companies and has now surpassed the 60 minutes of flight milestone.
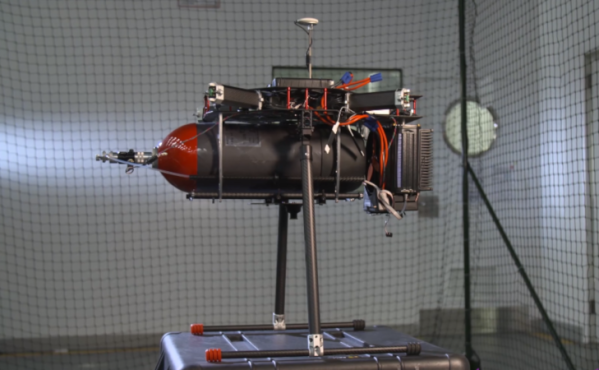
The initial target of the project was to achieve 60 minutes of continuous flight while carrying a 5 kg payload. The Lithium Polymer battery-powered UAVs flown by BATCAM allow around 12 minutes of useable flight. The recent test of the purpose-built fuel cell powered UAV saw it fly for an uninterrupted 70 minutes carrying a 5 kg payload. This was achieved on a UAV with below 20 kg maximum take-off mass, using a 6-litre cylinder containing hydrogen gas compressed to 300 bar.
While this is not world record for drones and it’s not exactly clear if there will be a commercial product nor the price tag, it is still an impressive feat for a fuel cell powered flying device. You can watch the footage of one of their tests bellow:















