Handcrafted gifts are special, and this one’s no exception. [John Pender] made a Tolkien-inspired box for his son and shared the details with us on Hackaday.io. This one-of-a-kind handcrafted box fulfills one role and does it perfectly – just like with the Doors of Durin, you have to say ‘friend’ in Elvish, and the box shall unlock for you.
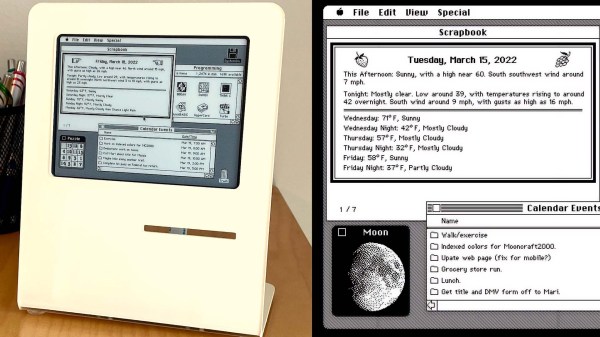
This box, carefully engraved and with attention paid to its surface finish, stands on its own as a gift. However, with the voice recognition function, it’s a project complicated enough to cover quite a few fields at once – woodworking, electronics, and software. The electronics are laid out in CNC-machined channels, and LED strips illuminate the “Say Friend And Come In” inscriptions once the box is ready to listen. If you’re wondering how the unlocking process works, the video embedded below shows it all.
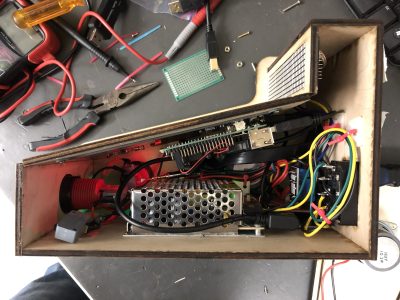
Two solenoids keep the lid locked, and in its center is a Pi Zero, the brains of the operation. With small batteries and a power-hungry board, power management is a bit intricate. Two capacitive sensors and a small power management device are always powered up. When both of the sensors are touched, a power switch module from Pololu wakes the Pi up. It, in turn, takes its sweet time, as fully-fledged Linux boards do, and lights up the LED strip once it’s listening.
Continue reading “Say Friend And Have This Box Open For You”