Here on Hackaday, too often do we turn our heads and gaze at the novelty of 3D printing functional devices. It’s easy to forget that other techniques for assembling functional prototypes exist. Here, [Reuben] nails the aspect of functional prototyping with the laser cutter with a real-world application: a roll-pitch friction differential drive built from just off-the shelf and laser-cut parts!
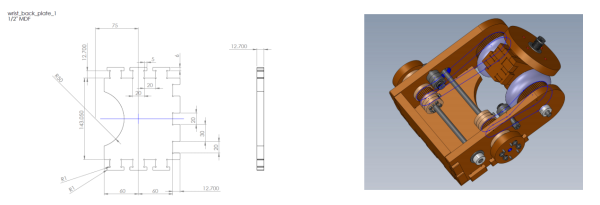
The centerpiece is held together with friction, where both the order of assembly and the slight wedged edge made from the laser cutter kerf keeps the components from falling apart. Pulleys transfer motion from the would-be motor mounts, where the belts are actually tensioned with a roller bearing mechanism that’s pushed into position. Finally, the friction drive itself is made from roller-blade wheels, where the torque transferred to the plate is driven by just how tightly the top screw is tightened onto the wheels. We’d say that [Reuben] is pushing boundaries with this build–but that’s not true. Rather, he’s using a series of repeatable motifs together to assemble a both beautiful and complex working mechanism.
This design is an old-school wonder from 2012 uncovered from a former Stanford course. The legendary CS235 aimed to teach “unmechanically-minded” roboticists how to build a host of mechanisms in the same spirit as MIT’s How-to-make-almost-Anything class. While CS235 doesn’t exist anymore, don’t fret. [Reuben] kindly posted his best lectures online for the world to enjoy.
Continue reading “Friction Differential Drive Is A Laser-Cut Triumph”