Noodle Feet is a robot — an artistically designed robot — that is a character from Sarah Petkus’ webcomic Gravity Road. This webcomic explores a post-human universe inhabited by robots, and dives deep into these robots’ exploration of the trash left behind from a human civilization.
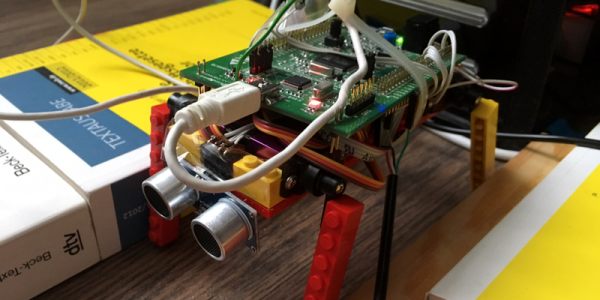
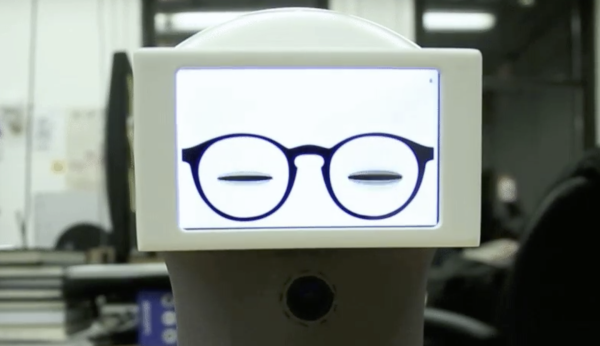
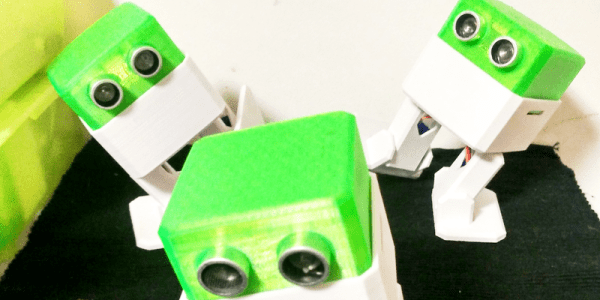
Sarah’s not just drawing these robots. She’s bringing them to life. The character Noodle Feet, so named because his legs are encased in pool noodles, has been made real with an aluminum skeleton, a PCB brain, and infrared detecting eyes. At the 2016 Hackaday SuperConference Sarah gave a talk on the challenges of making this robot real and the specifics of making her robot dig its toes into carpet, slobber all over the floor, and taste with its artificial tongue.
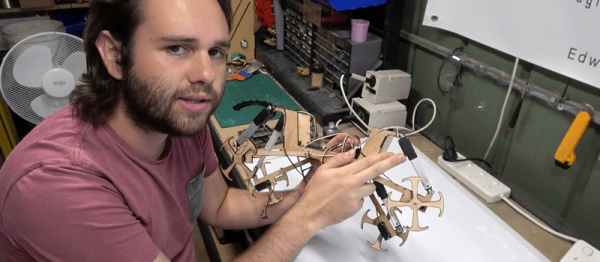
Since last year’s talk on Noodle Feet, Sarah has vastly improved the gripping strength of her noodle’s feet. Over the last two years of construction the mechanism to extend grippy, cat-like toenails has moved from cheap hobby servos to solenoids to a clever cam system. While these toe feet worked, the grip was never quite right, and the world isn’t completely covered in shag carpet. After the break we’ll take a closer look at the improvements that Sarah made to the design and how she came up with the ideas for each new iteration.