Finally the workings of the official BB-8 that you’ve seen rolling around at various events have been revealed. Its makers [Matt Denton] and [Josh Lee] participated in an hour-long presentation at Star Wars Celebration Europe 2016 just this past week where the various views of its internals were shown in action. It’s since had BB-8 builders (yours truly included) analyzing the workings for new ideas. We also now have the official name for it, red carpet BB-8.
For the first half of their talk they went over how BB-8 was implemented for Star Wars: The Force Awakens. As we’ve long known this was done using 7 puppeted BB-8’s, though it was revealed that only 4 were actually used, including a stationary one called the wiggler whose purpose you can guess. Another thing we didn’t know is that they did consider building a working BB-8 for filming but decided they needed something bullet proof, that would work right every time without making a film crew wait for repairs, and so went with the puppets instead.
The second half of their talk contained the big reveal, the mechanism inside red carpet BB-8’s ball. It turns out to be pretty close to what many builders have been doing. If you’ve seen the DIYer’s guide to the different BB-8 drive systems then you’ll understand when we say it’s a pendulum drive (aka axle drive). That is, there’s a motorized axle that crosses the middle of the ball and the ball rotates on that axle. Meanwhile a large mass suspended below the axle acts as the pendulum mass.

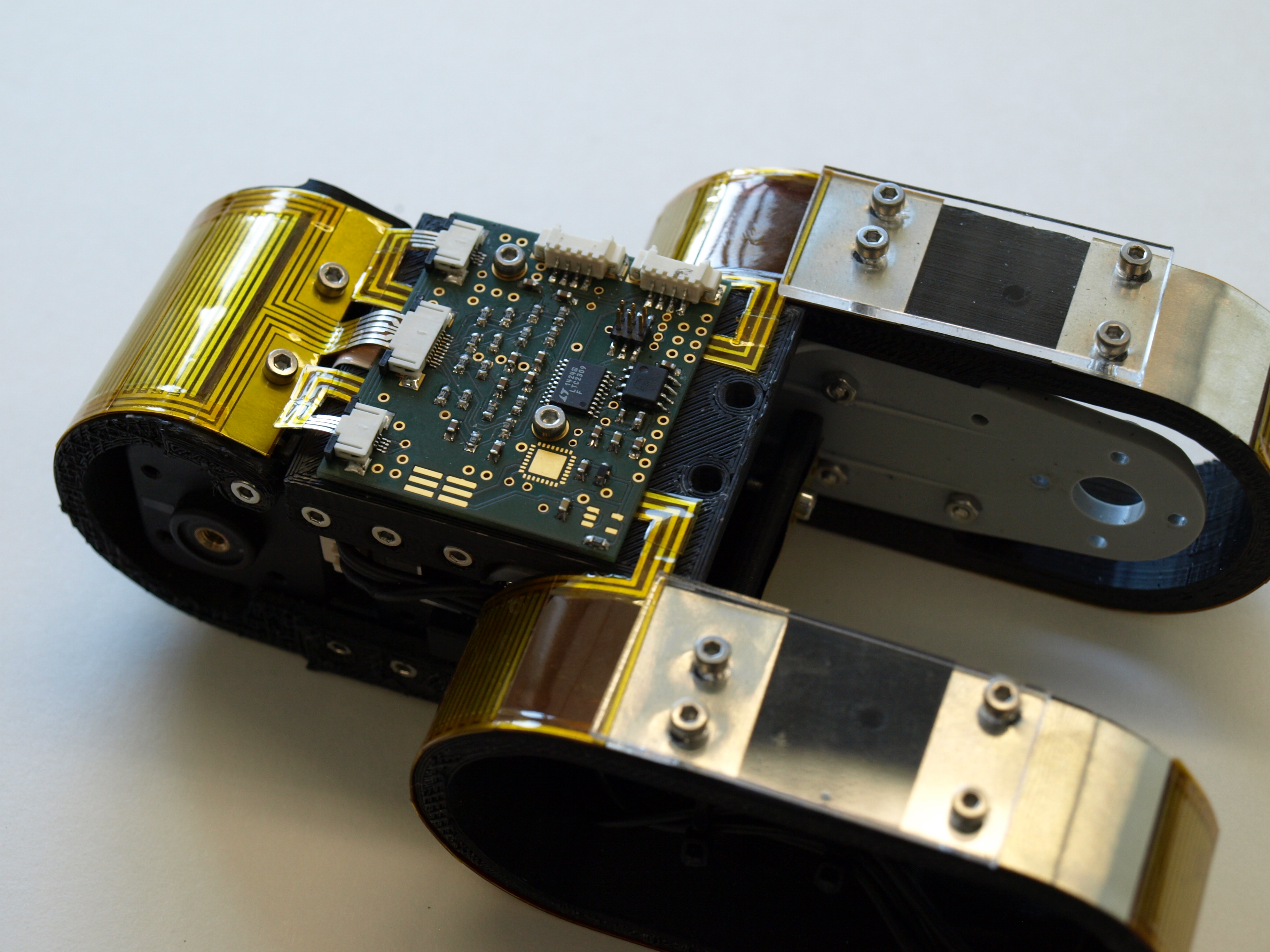
Red Carpet BB-8 side with cables

Red Carpet BB-8 side with actuator
BB-8 builders have known the importance of keeping as much mass as possible as low down as possible for stability, but it was revealed the great extent to which that has been done in the red carpet version. Motors for the head’s pitch and yaw are located at the bottom and their motion is transferred up to the center using what are maybe best known as bicycle brake cables. Another big reveal was a linear actuator for the body roll, tilting the center stuff with respect to the mass lower down. The actuator itself is located in the lower section. Also, BB-8 builders have been mounting the drive motors for rotating the ball with respect to the axle, in line with the axle. However, in red carpet BB-8 the motor is also at the bottom and its motion appears to be transferred up to the axle via belt and worm gears. You may mistake the gold cylinders on either side of the central gimbal system to be motors but they’re actually Moflon slip rings.
Those are just a few of the insights gained so far from analyzing the video below. Doubtless people will be noticing a lot more in the weeks to come.
Continue reading “How BB-8 Works Revealed At Star Wars Celebration Europe” →