Is your landscape congested with toxic waste, parched, or otherwise abandoned? The Terra Spider may be your answer to new life in otherwise barren wastelands.
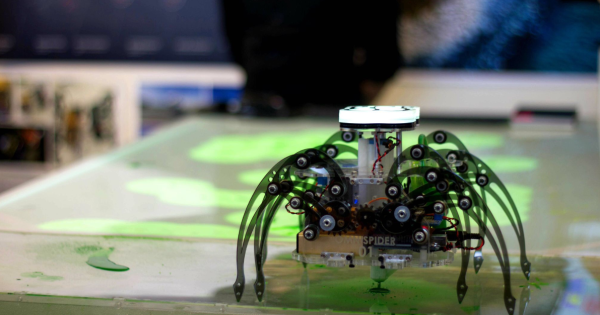
Bred in the Digital Craft Lab at the California College of the Arts, the current progress demonstrates the principle of deploying multiple eight-legged drones that can drill and deploy their liquid payload, intended to “repair or maintain” the landing site.
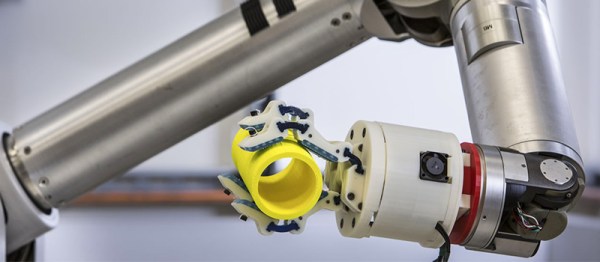
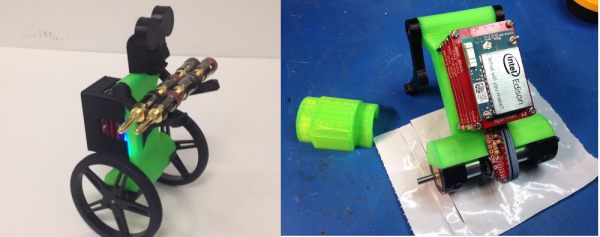
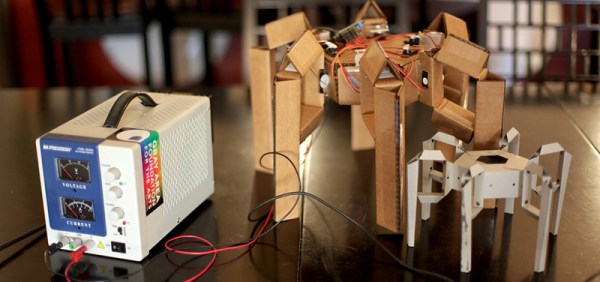
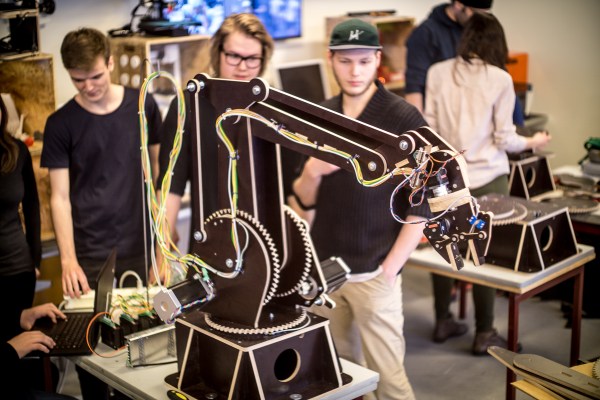
To deliver their project, students [Manali Chitre], [Anh Vu], and [Mallory Van Ness] designed and assembled a laser-cut octopod chassis, an actuated drilling mechanism, and a liquid deployment system all from easily available stock components and raw materials. While project details are sparse, the comprehensive bill-of-materials gives us a window into the process of putting together the pieces of a Terra Spider. The kinematics for movement are actuated by servos, a Sparkfun gear-reduced motor enables drilling, and a peristaltic pump handles the payload deployment.
It’s not every day that flying robots deploy drill-wielding spider drones. Keep in mind, though, that the Terra Spider is a performance piece, a hardware-based demonstration of a bigger idea, in our case: remote coverage and sample deployments in a barren wasteland. While, this project is still a work-in-progress, the bill-of-materials and successful deployment demos both testify towards this project’s extensive development.
With the earnest intent of repairing withering environments, perhaps this project has a future as an entry into this year’s Earth-saving Hackaday Prize….
Coming soon to a galaxy near you!
Continue reading “Terra Spider Repairs And Resurfaces New Frontiers”

 Starting today you can visit the project’s website and
Starting today you can visit the project’s website and