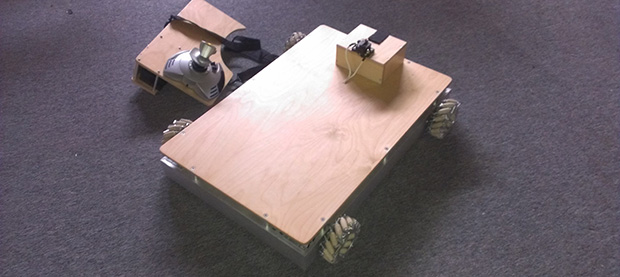
A while back, Hackaday visited the Clark Magnet School in Glendale, California to sneak a peek on their STEM-focused curriculum, FIRST robotics club, awesome A/V classroom, and a shop that puts most hackerspaces to shame. We saw a few builds while we were there, but [Jack]’s auto parking mecanum robot was in a class by itself. It deserves its own Hackaday post, and now that [Jack] is on Hackaday Projects, he’s sharing all the details.
The most impressive aspect of [Jack]’s build is the mecanum wheels; the side plates for the wheels were designed by [Jack] himself and machined on his school’s Haas mill. When the plates came out of the mill they were flat, and each of the fifteen little tabs on the plates needed to be bent at a 45 degree angle. With a CNC jig and a lot of time on his hands, [Jack] bent the tabs for all eight plates.
In addition to the plates, the rollers were custom made from non-expandable polyurethane poured into a CNC milled mold. That’s a one-part mold; [Jack] needed to make sixty of these little parts, one at a time.
The electronics are built around an Arduino Mega communicating with a joystick via an XBee. [Jack] found the relays in the off-the-shelf motor board couldn’t handle the current, so he replaced them with much, much larger ones in a hack job we’d be proud to call our own handiwork. There’s also a little bit of code that allows this motorized cart to pull off the best parallel parking job anyone could ever wish for. You can see that and a few videos of the construction below.