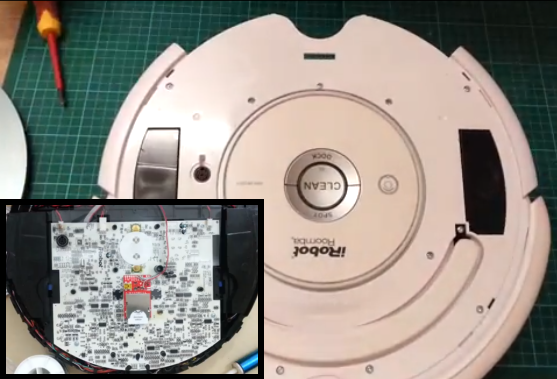
What was supposed to be a fun 1-day build ended up turning into a 3-day journey full of close calls when [Arthur] decided to give his Roomba Internet Connectivity.
The Roomba, whom [Arthur] calls Colin, has been in service for a couple of years, and once he got his hands on the Electric Imp, he had just the project in mind. With embedded Wi-Fi and a 32-bit processor all in an SD Card form factor, the Electric Imp makes it very easy to add the “Internet of Things” to just about anything you can think of. [Arthur] wanted to gain control of the Roomba, so he tapped into the SCI (Serial Command Interface). Now he can read out the Roomba’s on-board sensor data including battery voltage, current draw, and even the temperature.
These are the kind of walk-through’s we love to see, because he did it in real-time, so you get to experience all of the “surprises” along the way. For example, he removed an external charging port to make room for the added components, but that ended up disabling the dock charger. Then he discovered that when the Roomba was charging, the input voltage to the Electric Imp breakout board was too high, so he had to introduce an intermediate voltage regulator. But perhaps the biggest bump in the road was when he accidentally brushed the Electric Imp breakout board along the Roomba’s control board while power was on. Luckily the damage was isolated to just one smoked — a simple FET. The project turned out great, and (today) Colin’s data is actually visible through a public Xively feed.
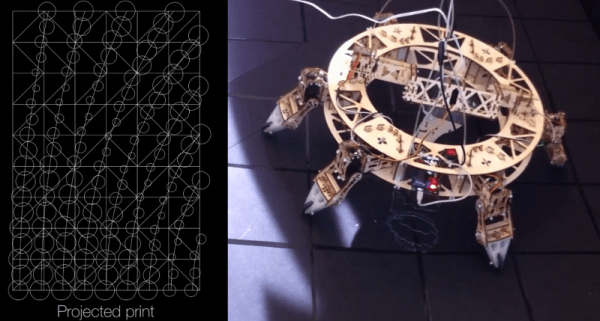
 [Trandi] can check ‘build a self-balancing robot’ off of his to-do list. Over a couple of weekends,
[Trandi] can check ‘build a self-balancing robot’ off of his to-do list. Over a couple of weekends, 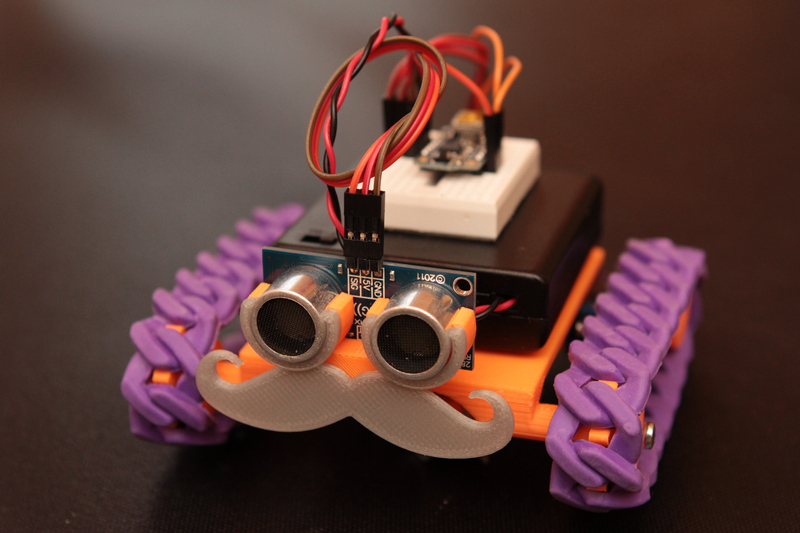 [Rick], an Adafruit learning system contributor, is excited by the implications of STEM’s reach into K-12 education. He was inspired to design
[Rick], an Adafruit learning system contributor, is excited by the implications of STEM’s reach into K-12 education. He was inspired to design 
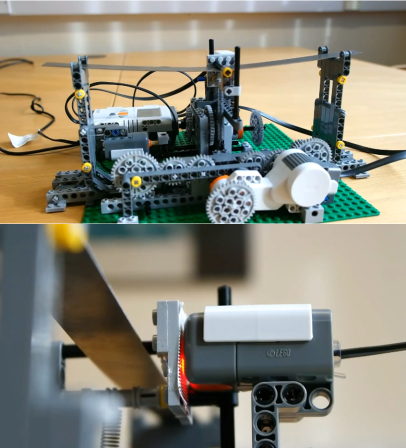 Learning with visuals can be very helpful. Learning with models made from NXT Mindstorms is just plain awesome, as [Rdsprm] demonstrates with this
Learning with visuals can be very helpful. Learning with models made from NXT Mindstorms is just plain awesome, as [Rdsprm] demonstrates with this 







