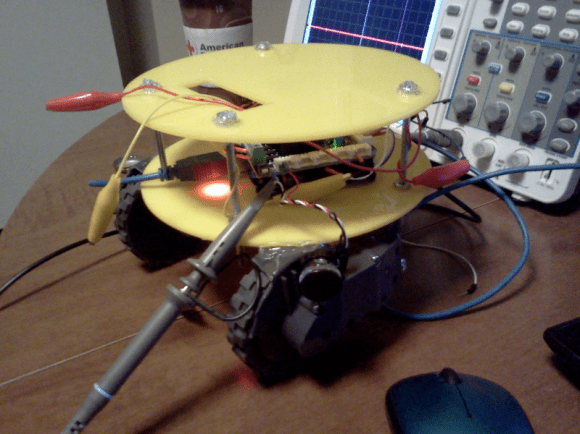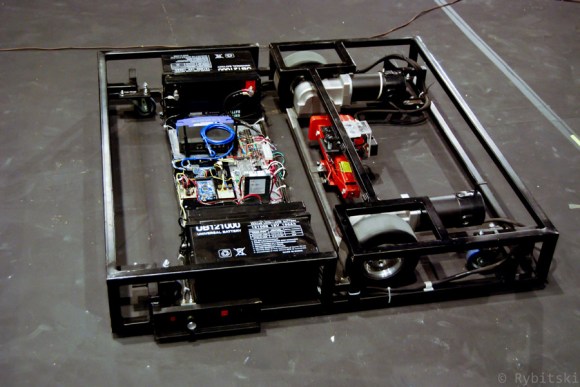
[Chris Rybitski] developed this low-profile robot to help move scenery on stage. The test footage shows it to be spry and able to move hundreds of pounds of cargo. The demo shows the addition of a wooden platform about twice the length of the metal chassis with casters at each end to support the extra weight. It seems to have no problem moving around with the weight of a couple of human passengers on board.
Crafty systems for changing huge sets has long made the theater a natural breeding ground for hacks. Balanced turn tables, rails systems, and the like are common place. But we think this has a ton of potential. Right now the electronics seem convoluted, as there is an Arduino running the motors which connects to the LAN using an Ethernet shield and that Linksys wireless router.
We think he should patch directly into the serial port of the router. If he loads DD-WRT or OpenWRT he can easily make the remote control a web interface. We also wonder about the possibility of making it a line-follower that can precisely position itself automatically using patterns on the floor.
Continue reading “Robot Theater Isn’t So Much For The Actors As The Stagehands”