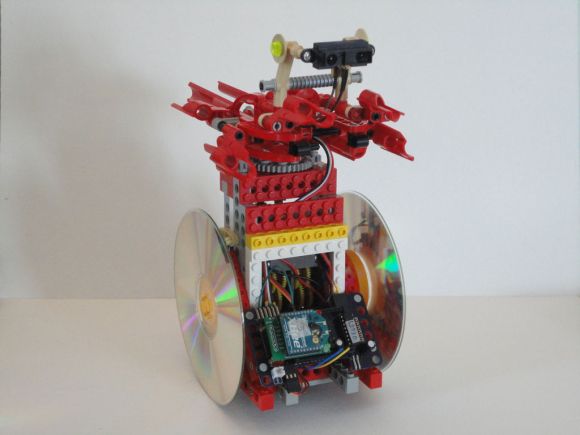
This rover built by [Sath02] is a great example that you don’t have to be a mechanical engineering wizard to get into robotics. He used LEGO pieces to help ease the difficulty of getting a rover up and running.
In this case the use of LEGO is strictly structural. The electronics are not the NXT parts you would expect to see when working with these popular toy blocks. Instead he’s put the Arduino Palm Plus into service. It’s an Arduino board that has rows of holes at either end to make it LEGO compatible. It also carries an LM293D motor controller and [Sath02] added an XBee module for wireless control.
At the top of the assembly is an IR distance sensor which is used for obstacle avoidance. You may not be interested in building and exact replica, but the techniques he uses for attaching the distance sensor, CD wheels, and fabricating the rest of the rover are good examples if you take on a LEGO build in the future.
Continue reading “Obstacle Avoiding LEGO Rover Uses CDs For Wheels”