On the recent 256th episode of the Hackaday podcast, [Kristina] mentioned her favorite fictional robot was Rosie from The Jetsons. [Robert Zollna] must agree since he built a reimagined Rosie and it even caught the notice of mainstream outlet People magazine.
We didn’t find much information outside of the TikTok video (see below; you can use the Guest button if you don’t have an account). However, there were a few clever ideas here. First, the robot mechanism is actually Rosie’s vacuum cleaner. Like a tail wagging a dog, an off-the-shelf floor vac tows the robot body.
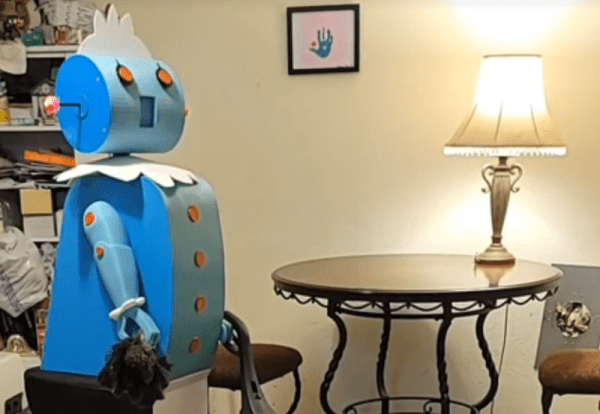
Rosie herself is clearly an office chair base with an artistic body. The head rotates, and the mouth appears to open and close, so there’s apparently a little more electronics inside, but that’s nothing you couldn’t throw together with some RC servos and an ESP32.
Some videos cover the build so you might be able to glean more details, but the bite-sized videos aren’t very descriptive even though they are fun to watch. If you thought folks documenting their projects on YouTube was bad, you’re really gonna love the TikTok generation.
We like the look of Rosie, but as a practical matter, we need our robot vac to be smaller, not larger. However, using these off-the-shelf robots as a quick start for a robotics project is reasonable. Especially if you can pick up one cheap. Not that that’s a new idea. They even make stripped-down units with the intent that you don’t want to use them as cleaners.